















- Stock: In Stock
- Product code: 00-00014529
- Weight Brutto: 42.00kg

More from this brand




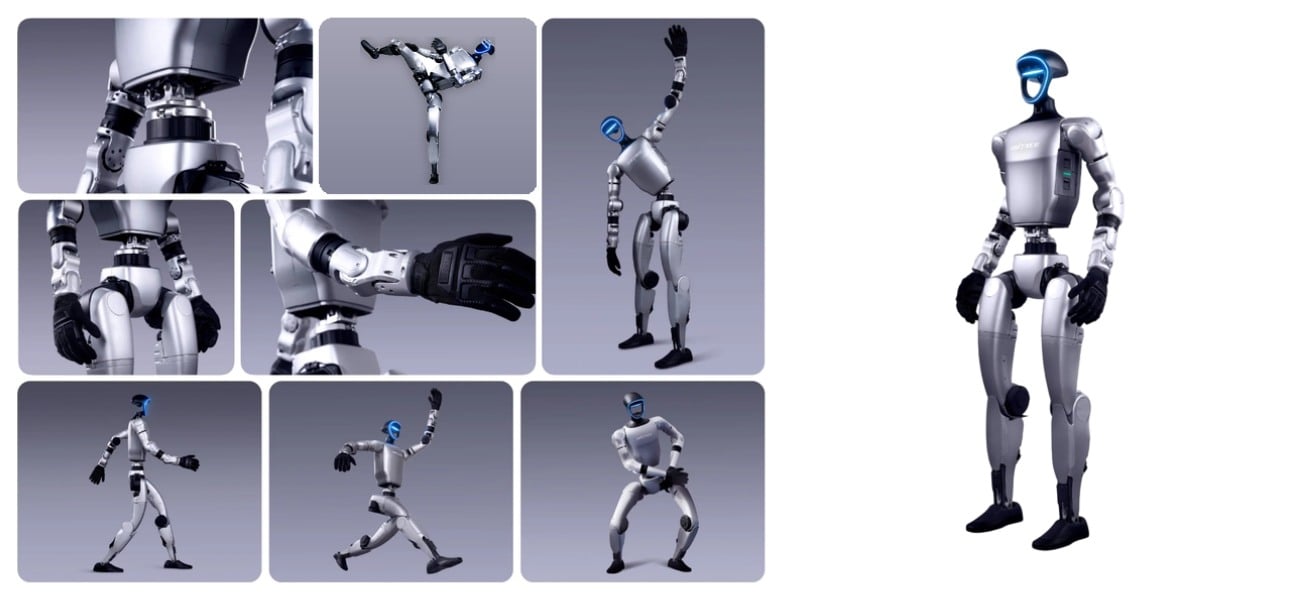
Unitree G1 Edu Pro B-U10 Humanoid Robot for Scientific Research
Unitree G1 Edu Pro B-U10 is a humanoid robot designed for scientific research, education, artificial intelligence algorithm development, and human-robot interaction experiments, with 37 degrees of freedom, an NVIDIA Jetson Orin NX 16GB computing module, and two three-fingered Dex3-1 hands with force control and tactile sensors. The model is equipped with all the features of the standard G1 Edu version and additionally with two Dexterous Hands Dex3-1 with three fingers, which have high agility and are force-controlled with tactile feedback. The robot supports secondary development and works with ROS2 and SDK2 tools, allowing programming of movements, navigation, and interaction with objects in real-time. Equipped with an Intel RealSense D435i camera, 3D LiDAR, and other sensors. Each hand has 33 tactile sensors and can delicately work with objects thanks to hybrid force control.

Advantages of Unitree G1 Edu Pro B-U10
- Degrees of freedom and humanoid kinematics. The humanoid robot has 37 degrees of freedom. Large joint movement angles of the arms, legs, and body allow for complex manipulations, balancing, and movement in research project conditions.
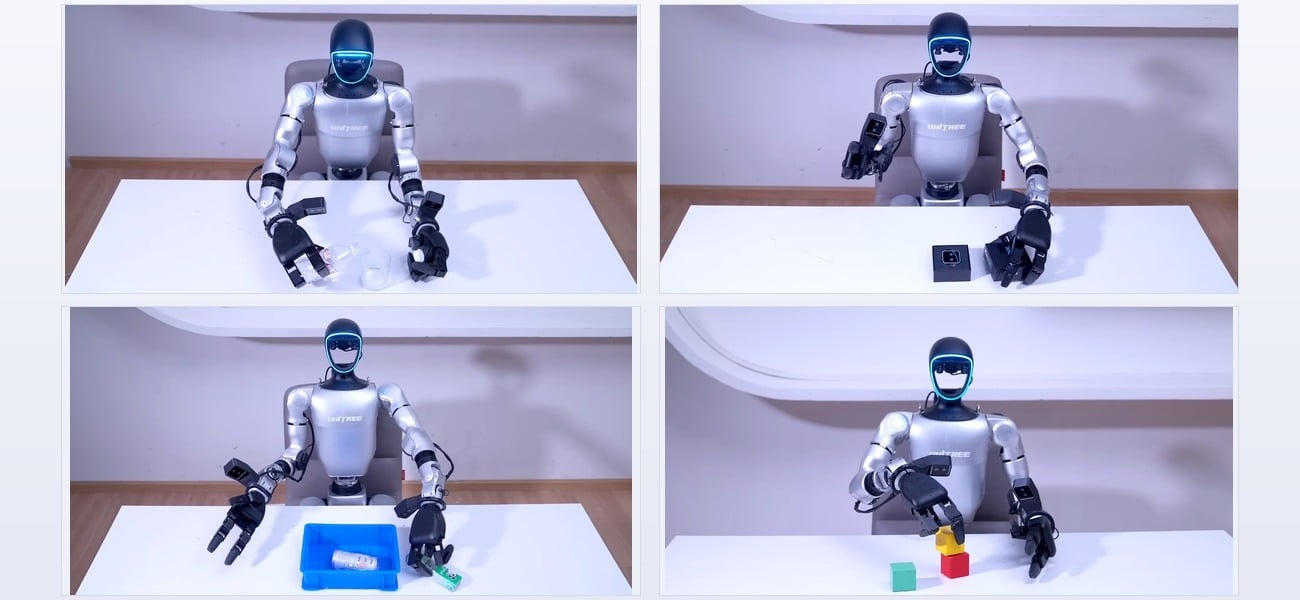
- Humanoid Dex3-1 hands. The model is equipped with two three-fingered Dex3-1 hands with force-controlled management and 33 tactile sensors on each hand. The manipulators support precise work with fragile objects, collect data on pressing force in real-time, and ensure high-precision object grasping.
- High computational power. The onboard NVIDIA Jetson Orin NX 16GB module with over 100 TOPS is optimized for computer vision processing, imitation learning, and reinforcement learning methods. It works with multimodal AI models UnifoLM.
- Comprehensive spatial perception. A 360° circular view is provided by the proprietary Unitree 4D LiDAR-L1, Intel RealSense D435i depth camera, and additional 3D LiDAR for navigation and 3D SLAM. A 4-microphone array is responsible for command recognition. This allows building three-dimensional room maps, recognizing obstacles, and working with voice commands.
- Flexible programming. Full low- and high-level control over drives through unitree_sdk2 (C++/Python). The robot is fully compatible with ROS2 and has ready-made URDF digital models for simulation in Gazebo and Isaac Sim, simplifying algorithm testing before running on real equipment.
- Reliable power mechanics. Knee drives develop torque up to 120 Nm, and industrial roller bearings are designed for long-term use. A removable 9000 mAh battery provides up to 2 hours of autonomous operation, and a foldable body measuring 690x450x300 mm facilitates transportation between laboratories and educational centers.
- Official warranty. The Edu series robotic complex comes with an 18-month warranty, providing full technical support and service.
Design and Hardware
The robotic platform has a stable architecture with a height of 1320 mm and a total weight of about 35 kg, designed for long-term experiments and intensive dynamic loads. The moving knee joints are equipped with high-efficiency permanent magnet motors (PMSM) with low inertia, generating torque up to 120 Nm for instant body stabilization, running, or overcoming obstacles.
Large deviation angles of the pelvic, knee, and waist joints allow for complex movement scenarios not accessible to most other humanoid platforms. All moving joints of the mechanism are equipped with industrial cross-roller bearings for high positioning accuracy. The cable wiring is laid in a hidden way inside the hollow frame elements, fully protecting the communication lines from mechanical wear. An important engineering advantage is the presence of a built-in 5W speaker in the head, which, together with the microphone array, provides full two-way voice communication. For convenient transportation between laboratories or auditoriums, the body folds to compact dimensions — 690×450×300 mm.
Precise Object Handling Thanks to Flexibility
Unitree G1 Edu Pro B-U10 is equipped with two three-fingered Dex3-1 hands with force control and 33 tactile sensors on each hand. The hands are agile with tactile sensation and fully compatible with all the capabilities of the standard Edu version. The main feature is the integrated hybrid control of force and joint position, allowing the device to accurately calculate the interaction force with the environment. This enables the robot to delicately handle objects of various geometric shapes, densities, and fragility — glassware, tools, and other objects.
The anatomical structure of the manipulators supports data collection on pressing force and material resistance in real-time, helping researchers to work out precise grasping scenarios. The Dex3-1 hands provide high precision and sensitivity thanks to 33 tactile sensors on each hand.
Control Center and Computing Platform
For engineers and developers, Unitree G1 Edu Pro B-U10 offers full low-level and high-level control over drives and sensors through the open unitree_sdk2 interface in C++ and Python programming languages. Full integration with the ROS2 operating system simplifies the connection of third-party software modules and plugins. The availability of detailed URDF digital models allows for accurate simulation of the humanoid's physical behavior in virtual environments like Gazebo and NVIDIA Isaac Sim before testing algorithms on real hardware.
Standardized holes are provided on the robot's back for secure attachment of additional equipment. For connecting external sensors and payload, power lines of different voltages are provided at 12V, 24V, and 58V, as well as high-speed engineering interfaces: Gigabit Ethernet RJ45 ports, USB-C, and industrial buses GPIO, I²C, and UART.
Intelligent Sensors for Precise Object Recognition
Spatial orientation and map building in three-dimensional space are based on a comprehensive combination of modern machine vision sensors. The robot's head integrates the proprietary circular Unitree 4D LiDAR-L1, which performs 21,600 laser scans per second, providing ultra-precise scanning of the surrounding environment without blind spots.
The perception system is complemented by an Intel RealSense D435i RGB-D depth camera and an additional long-range 3D LiDAR. This hybrid sensor array allows the robot to build 3D maps using SLAM technology without delays, recognize objects on the path, and dynamically avoid obstacles. Acoustic information is received and analyzed by an array of 4 built-in microphones, which implement algorithms for accurate localization of the sound source in the room and recognition of user voice commands.
Educational Platform for AI Development and Autonomous Behavior Testing
The main computing node of the Unitree G1 Edu Pro B-U10 is an onboard computer based on the NVIDIA Jetson Orin NX module with a capacity of 16 GB. With computational power exceeding 100 TOPS, the platform is ideally optimized for local processing of heavy neural networks and computer vision algorithms directly on the robot's board.
The model supports advanced machine learning methods — imitation learning (based on human operator actions) and reinforcement learning. Software capabilities and movement patterns are regularly updated via wireless OTA packages. The hardware is fully adapted for local work with large multimodal artificial intelligence models UnifoLM. This allows programming completely autonomous robot behavior, recognizing complex sequential engineering commands, and interacting with people without the need for constant connection to cloud servers.
Applications
Unitree G1 Edu Pro B-U10 is designed for scientific and educational projects. The platform allows conducting experiments with autonomous mobility, low-level drive control, and manipulator management in the following areas:
- Scientific research and R&D: development of artificial intelligence algorithms, testing reinforcement learning methods, and modeling human-machine interaction.
- Navigation and spatial perception: research on autonomous navigation, computer vision, building three-dimensional room maps, and SLAM algorithms.
- Manipulation and motion control: practicing delicate object grasping using Dex3-1 tactile hands, testing walking patterns, and dynamic motion control algorithms.
- Education and applied applications: teaching students robotics and mechatronics, conducting university laboratory projects, and designing service robots.
Compatibility with Educational Platforms
Unitree G1 Edu Pro B-U10 is adapted for use in universities, research laboratories, and educational centers. The open architecture simplifies integration with additional equipment and software complexes.
The humanoid robot supports working with:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- external cameras;
- additional LiDAR sensors;
- laboratory data collection systems;
- research machine learning platforms;
- network Ethernet devices;
- GPIO modules and peripheral equipment.
Thanks to standardized connection interfaces, the platform easily adapts to various scientific and educational projects. The availability of technical documentation and developer tools allows for quickly starting work on your own research tasks.
Package Contents
The device comes assembled and ready for initial launch after unpacking. The basic package includes all necessary elements for autonomous power and wireless control.
- Unitree G1 Edu humanoid robot.
- Quick-release lithium battery with a capacity of 9000 mAh.
- Network charger with parameters 54 V, 5 A.
- Wireless handheld control remote.
- User manual and technical passport.
Technical Specifications of Unitree G1 EDU
| Parameter | Value |
| Working position dimensions | 1320x450x200 mm |
| Folded position dimensions | 690x450x300 mm |
| Net weight with battery | About 35 kg |
| Number of degrees of freedom (DOF) | 37 DoF |
| Degrees of freedom of one leg | 6 |
| Degrees of freedom of the body | 1 |
| Degrees of freedom of one arm | 5 (including Dex3-1 hand) |
| Type of manipulator hands | 2x Dex3-1 force-controlled three-finger dexterous hands (tactile) |
| Tactile sensors | 33 on each hand |
| Maximum load on the hand | Up to 3 kg |
| Maximum torque of the knee joint | 120 Nm |
| Joint bearings | Industrial cross-roller bearings |
| Type of drives | PMSM with internal rotor, low inertia, and high speed |
| Body rotation (Z-axis) | ±155° |
| Body tilt (X-axis) | ±30° |
| Body tilt (Y-axis) | ±30° |
| Knee joint movement | 0° ~ 165° |
| Hip joint (Pitch) | ±154° |
| Hip joint (Roll) | -30° ~ +170° |
| Hip joint (Yaw) | ±158° |
| Wrist (Pitch) | ±92.5° |
| Wrist (Yaw) | ±92.5° |
| Hollow internal wiring through joints | Yes |
| Joint encoders | Dual encoders |
| Cooling system | Local air cooling |
| Battery type | Lithium battery 13S |
| Battery capacity | 9000 mAh |
| Removable battery | Yes (hot-swap support) |
| Autonomous operation time | Up to 2 hours |
| Charger | 54 V, 5 A |
| Base computing platform | 8-core high-performance processor |
| High-performance computing module | NVIDIA Jetson Orin NX 16GB |
| Environmental perception sensors | Intel RealSense D435i depth camera, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Microphone array | 4 integrated microphones |
| Built-in speaker | 5 W |
| Wireless interfaces | Wi-Fi 6, Bluetooth 5.2 |
| Access to hardware interfaces | Two Gigabit Ethernet ports (RJ45), 4 x USB-C, GPIO, I²C, UART buses |
| Power outputs | 12V, 24V, 58V |
| Software environments | ROS 2, Python, C++, unitree_sdk2, URDF models |
| Secondary development | Fully supported |
| OTA updates | Supported |
| Manufacturer's warranty | 18 months |
What to Do Before and During Operation
- Power control: Before each launch, be sure to check the battery charge level to avoid sudden shutdowns during movement execution.
- Surface preparation: Use only a flat, dry, and non-slippery surface for practicing walking algorithms, stabilization, and balancing.
- System updates: Regularly update software and motion skill packages through official wireless tools (OTA) from Unitree.
- Development ecosystem: For creating your own algorithms, simulations, and secondary development, it is recommended to use official ROS2 and unitree_sdk2 environments.
Strict Restrictions and Safety
- Start without support. Do not power on the Unitree G1 Edu when it is lying on the ground or in an unstable position without support. Initial startup and calibration should only occur on a protective hanging stand or a special chair.
- Rough battery installation. Avoid forcing the battery into the fuselage with excessive physical force. If the block does not smoothly fit into the slots until it clicks, immediately stop the process to avoid damaging internal power connectors.
- Programming without Debug mode. Do not send custom commands via SDK without first switching the robot to development mode (L2 + R2). Ignoring this rule causes a hard conflict with the built-in motion controller, leading to strong jitter and drive failure.
- Overloading. Do not load the Dex3-1 robotic hands with more than 3 kg. Overloading will lead to critical overheating of the servos and gearbox failure.
- Hot sensor connection. Do not connect or disconnect external sensors and expansion modules to GPIO, I²C, UART interfaces on the robot's back when the system is powered on and voltage is applied to the ports. All manipulations with payload are performed only on a de-energized device.
Buy Unitree G1 Edu Pro B-U10
If you plan to buy Unitree G1 Edu Pro B-U10 for research or educational purposes, check the current Unitree G1 price, price list, and available configurations before placing an order.



































 Delivery & Advertising Robot")
 Delivery & Advertising Robot")
