

















- Dostępność: Na magazynie
- Kod produktu: 00-00014530
- Waga Brutto: 42.00kg

Więcej produktów tej marki




Unitree G1 Edu Pro E-U11 robot-humanoid do badań robotycznych i nauki
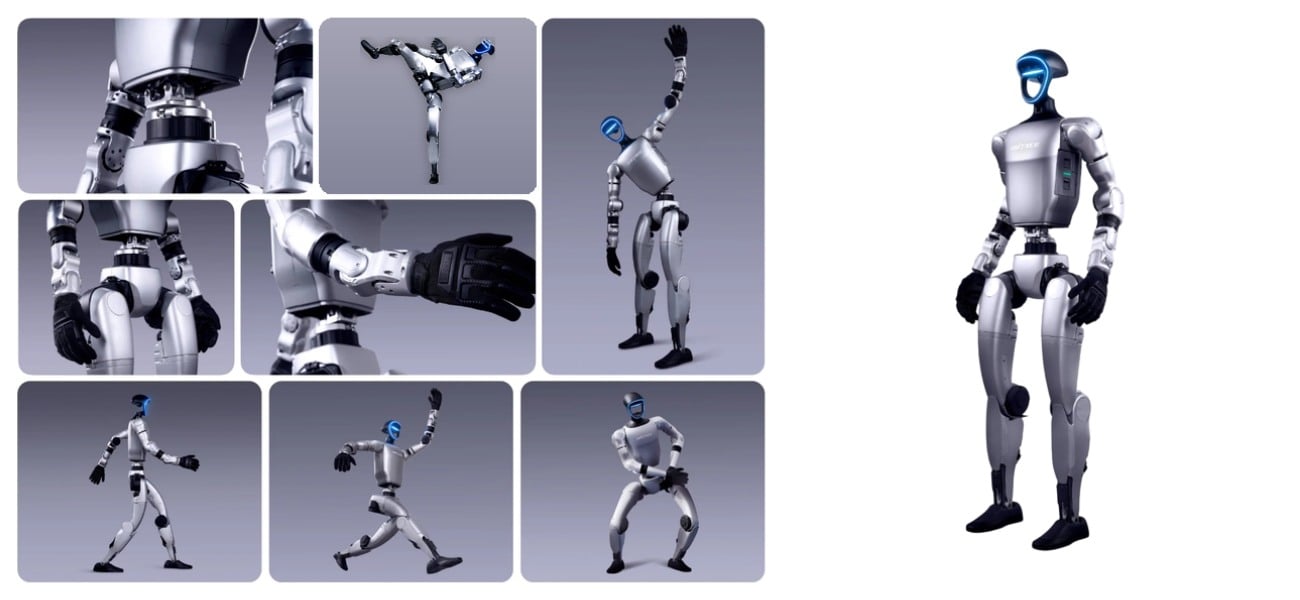
Unitree G1 Edu Pro E-U11 — to robot humanoidalny do badań, rozwoju algorytmów sztucznej inteligencji i projektów edukacyjnych, z 35 stopniami swobody, dwoma zrobotyzowanymi dłońmi Revo 2 Basic i dwoma modułami obliczeniowymi wysokiego poziomu. Model jest przeznaczony dla uniwersytetów, laboratoriów badawczych, zespołów R&D, centrów edukacyjnych i innowacyjnych działów przedsiębiorstw, które pracują nad zadaniami ruchu, nawigacji, interakcji z przedmiotami i autonomicznego zachowania robotów. Platforma może być również używana do demonstracji na wystawach, konferencjach, forach technologicznych i wydarzeniach korporacyjnych, gdzie konieczne jest pokazanie możliwości nowoczesnej robotyki humanoidalnej. Urządzenie obsługuje wszystkie funkcje wersji Unitree G1 Edu Standard Edition.

Główne zalety Unitree G1 Edu Pro E-U11
- 35 stopni swobody. Taka konfiguracja pozwala na opracowywanie skomplikowanych scenariuszy ruchowych i badanie kinematyki humanoidalnej.
- Dwie zrobotyzowane dłonie Revo 2 Basic. Konstrukcja pięciopalczasta nadaje się do testowania algorytmów chwytania i manipulacji przedmiotami o różnych kształtach.
- Dwa moduły obliczeniowe wysokiego poziomu. Zasoby obliczeniowe mogą być stosowane do algorytmów sterowania, uczenia maszynowego i eksperymentów z sztuczną inteligencją.
- Platforma do rozwoju AI. Robot pozwala na badanie autonomicznego zachowania, planowania ruchu i interakcji z otoczeniem.
- Nauka ruchów, nawigacji i pracy z obiektami. Robot humanoidalny może być używany do opracowywania praktycznych scenariuszy w robotyce i projektach naukowych.
- Gwarancja 18 miesięcy. Okres gwarancyjny obejmuje Unitree G1 Edu Pro E-U11.
- Platforma do nauki i badań. Unitree G1 Edu Pro E-U11 nadaje się dla uniwersytetów, laboratoriów naukowych, centrów innowacji i zespołów pracujących nad projektami robotycznymi.
Konstrukcja i możliwości ruchowe
Humanoidalny robot Unitree jest zbudowany według schematu humanoidalnego z ruchomymi węzłami rąk, nóg i korpusu. Konstrukcja pozwala na opracowywanie zadań balansowania, przemieszczania się i koordynacji ruchów.
Obecność 35 stopni swobody stwarza warunki do badania skomplikowanych trajektorii ruchu i interakcji między poszczególnymi stawami. Taka architektura jest przydatna podczas nauki algorytmów sterowania i oceny zachowania humanoidalnych robotów w różnych scenariuszach.
Ręce i nogi działają jako jeden system kinematyczny, co umożliwia badanie ruchów zbliżonych do ludzkich. Jest to ważne dla programów edukacyjnych, kursów robotyki i eksperymentów z mobilnością.
Zrobotyzowane dłonie Revo 2 Basic
Unitree G1 Edu Pro E-U11 jest wyposażony w dwie pięciopalczaste zrobotyzowane dłonie Revo 2 Basic. Są one przeznaczone do pracy z przedmiotami i testowania algorytmów chwytania.
Zrobotyzowane dłonie Revo 2 Basic pozwalają na badanie różnych sposobów interakcji z obiektami, w tym utrzymywania, przenoszenia i zmiany pozycji przedmiotów. Takie możliwości są przydatne do nauki robotów pracy rękami i zbierania danych dla algorytmów uczenia maszynowego.
Obecność dwóch dłoni pozwala również na modelowanie scenariuszy dwustronnej manipulacji, które często są wykorzystywane w badaniach humanoidalnej robotyki.
Możliwości obliczeniowe i rozwój AI
Robot humanoidalny Unitree G1 Edu Pro E-U11 jest wyposażony w dwa moduły obliczeniowe wysokiego poziomu. Mogą być one stosowane do rozwoju i testowania algorytmów sterowania, uczenia maszynowego i autonomicznego zachowania.
Platforma nadaje się do zadań związanych z badaniem ruchów, nawigacją i analizą interakcji robota z otoczeniem. Robot do rozwoju AI może być używany w kursach edukacyjnych, pracach laboratoryjnych i projektach badawczych, gdzie potrzebna jest rzeczywista platforma humanoidalna do weryfikacji algorytmów.
Ponieważ dla tego modelu w dostarczonym źródle nie potwierdzono listy narzędzi programowych, informacje o wsparciu dla konkretnych platform rozwoju wymagają dodatkowego potwierdzenia przed zamówieniem.
Zgodność z platformami edukacyjnymi
Unitree G1 Edu Pro E-U11 jest dostosowany do użytku na uniwersytetach, w laboratoriach badawczych i centrach edukacyjnych. Otwarta architektura ułatwia integrację z dodatkowym sprzętem i kompleksami programowymi.
Robot humanoidalny obsługuje pracę z:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- zewnętrznymi kamerami;
- dodatkowymi czujnikami LiDAR;
- laboratoryjnymi systemami zbierania danych;
- platformami badawczymi uczenia maszynowego;
- urządzeniami sieciowymi Ethernet;
- modułami GPIO i sprzętem peryferyjnym.
Dzięki standaryzowanym interfejsom połączeniowym platforma łatwo adaptuje się do różnych projektów naukowych i edukacyjnych. Obecność dokumentacji technicznej i narzędzi dla deweloperów pozwala szybko rozpocząć pracę nad własnymi zadaniami badawczymi.
Obszary zastosowania
Unitree G1 Edu Pro E-U11 jest przeznaczony do zadań badawczych, edukacyjnych i inżynieryjnych, gdzie potrzebna jest rzeczywista platforma humanoidalna do weryfikacji algorytmów i praktycznych scenariuszy pracy robotów. Model może być używany zarówno w projektach naukowych, jak i podczas demonstracji technologicznych, wystaw, badań produkcyjnych i wydarzeń publicznych.
- Uniwersytety: nauka studentów robotyki, mechatroniki i systemów sterowania.
- Laboratoria R&D: testowanie nowych algorytmów ruchu, nawigacji i interakcji z obiektami.
- Robotyka: badanie kinematyki humanoidalnej i sterowania systemami wielostawowymi.
- Sztuczna inteligencja: nauka i weryfikacja modeli autonomicznego zachowania robotów.
- Centra edukacyjne: prowadzenie zajęć praktycznych i demonstracji technologii robotycznych.
- Badania interakcji człowiek-maszyna: badanie sposobów interakcji ludzi z humanoidalnymi robotami.
- Testowanie autonomicznej nawigacji: opracowywanie algorytmów orientacji i przemieszczania się w pomieszczeniach.
- Praca z przedmiotami: badanie scenariuszy chwytania, utrzymywania i przenoszenia obiektów.
- Wystawy technologiczne i wydarzenia demonstracyjne: prezentacja rozwiązań robotycznych, projektów naukowych i programów edukacyjnych.
- Wydarzenia i imprezy publiczne: demonstracja możliwości humanoidalnych robotów podczas konferencji, forów i wystaw tematycznych.
- Badania produkcyjne: weryfikacja perspektyw zastosowania humanoidalnych robotów w operacjach pomocniczych i eksperymentalnych procesach produkcyjnych.
- Centra innowacji korporacyjnych: testowanie nowych podejść do automatyzacji i interakcji robotów z personelem.
- Centra rozwoju nowych technologii: zbieranie danych do tworzenia i doskonalenia algorytmów sterowania robotami.
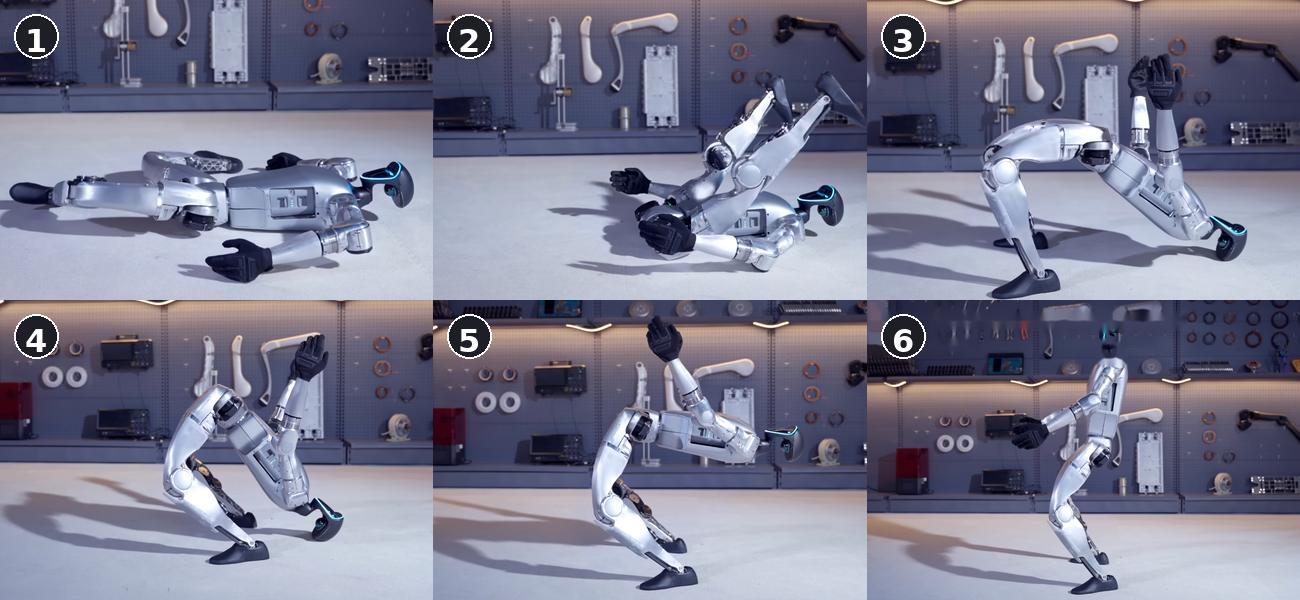
Aby lepiej zrozumieć, jak działa Unitree G1 Edu Pro E-U11, obejrzyj poniższy film. Widać w nim ruchy robota, jego możliwości i przykłady zastosowania do nauki, badań, testowania algorytmów i demonstracji.
Kompletacja
Unitree G1 Edu Pro E-U11 jest dostarczany w stanie złożonym i przygotowany do wstępnej konfiguracji po otrzymaniu. Dokładny skład zestawu zależy od konfiguracji i jest uzgadniany przed złożeniem zamówienia.
- Humanoidalny robot Unitree G1 EDU — 1 szt.
- Akumulator 9000 mAh — 1 szt.
- Ładowarka 54 V 5 A — 1 szt.
- Kontroler ręczny — 1 szt.
- Dodatkowy moduł obliczeniowy (w zależności od konfiguracji) — 1 szt.
Specyfikacje techniczne Unitree G1 EDU Pro E-U11
| Parametr | Wartość |
|---|---|
| Waga netto z akumulatorem | Około 35 kg |
| Liczba stopni swobody (DOF) | 35 DoF |
| Stopnie swobody jednej nogi | 6 |
| Stopnie swobody korpusu | 1 |
| Stopnie swobody jednej ręki | 5 |
| Typ dłoni-manipulatorów | Revo 2 Basic (pięciopalczaste humanoidalne) |
| Wymiary złożonego stanu | 690x450x300 mm |
| Wymiary roboczego stanu | 1320x450x200 mm |
| Graniczne obciążenie na rękę | Do 3 kg |
| Maksymalny moment obrotowy stawu kolanowego | 120 Nm |
| Łożyska stawów | Przemysłowe łożyska rolkowe krzyżowe |
| Typ napędów | PMSM z wewnętrznym wirnikiem, niską inercją i dużą prędkością |
| Obrót korpusu (oś Z) | ±155° |
| Pochylenie korpusu (oś X) | ±30° |
| Pochylenie korpusu (oś Y) | ±30° |
| Ruch stawu kolanowego | 0° ~ 165° |
| Staw biodrowy (Pitch) | ±154° |
| Staw biodrowy (Roll) | -30° ~ +170° |
| Staw biodrowy (Yaw) | ±158° |
| Nadgarstek (Pitch) | ±92,5° |
| Nadgarstek (Yaw) | ±92,5° |
| Pusta wewnętrzna prowadzenie przez stawy | Tak |
| Enkodery stawów | Podwójne enkodery |
| System chłodzenia | Lokalne chłodzenie powietrzem |
| Typ akumulatora | Akumulator litowy 13S |
| Pojemność akumulatora | 9000 mAh |
| Wyjmowany akumulator | Tak (obsługa gorącej wymiany) |
| Czas pracy na baterii | Do 2 godzin |
| Ładowarka | 54 V, 5 A |
| Podstawowa platforma obliczeniowa | 8-rdzeniowy procesor wysokowydajny |
| Moduł wysokowydajnych obliczeń | NVIDIA Jetson Orin NX 16GB |
| Czujniki percepcji środowiska | Kamera głębi Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Macierz mikrofonów | 4 zintegrowane mikrofony |
| Wbudowany głośnik | 5 W |
| Interfejsy bezprzewodowe | Wi-Fi 6, Bluetooth 5.2 |
| Dostęp do interfejsów sprzętowych | Dwa porty Gigabit Ethernet (RJ45), 4 x USB-C, magistrale GPIO, I²C, UART |
| Wyjścia zasilania | 12V, 24V, 58V |
| Środowiska programowe | ROS 2, Python, C++, unitree_sdk2, modele URDF |
| Wtórna rozwój | Obsługiwane w pełnym zakresie |
| Aktualizacje OTA | Obsługiwane |
| Gwarancja producenta | 18 miesięcy |
| Przeznaczenie | Badania akademickie, sztuczna inteligencja, uczenie maszynowe, testowanie SLAM |
Ostrzeżenia dotyczące użytkowania Unitree G1 Edu Pro E-U11
- Uruchamianie bez podparcia. Nie włączaj Unitree G1 Edu Pro E-U11, jeśli robot leży na podłodze, jest przechylony lub znajduje się w niestabilnej pozycji bez podparcia. Pierwsze uruchomienie, kalibrację i testowanie podstawowych ruchów należy wykonywać na ochronnym stojaku wiszącym lub na specjalnym krześle podpierającym.
- Nieprawidłowe zamontowanie akumulatora. Nie wciskaj baterii do obudowy z nadmierną siłą. Jeśli akumulator nie wchodzi płynnie po prowadnicach do zablokowania, przerwij instalację i sprawdź jego położenie. Siłowe zamontowanie może uszkodzić złącza zasilania i wewnętrzne grupy kontaktowe.
- Programowanie bez trybu rozwoju. Nie wysyłaj własnych poleceń przez SDK bez wcześniejszego przejścia w tryb rozwoju przewidziany przez producenta. W przeciwnym razie może dojść do konfliktu między zewnętrznymi poleceniami a wbudowanym kontrolerem ruchów, co może spowodować szarpnięcia, drgania napędów, błędy stabilizacji lub uszkodzenie mechaniczne węzłów.
- Przekroczenie obciążenia na dłonie. Nie przekraczaj dopuszczalnego obciążenia dla zrobotyzowanych dłoni Revo 2 Basic. Praca z zbyt ciężkimi przedmiotami może prowadzić do przegrzewania serwomechanizmów, przyspieszonego zużycia przekładni i utraty precyzji chwytania.
- Podłączanie modułów pod napięciem. Nie podłączaj ani nie odłączaj zewnętrznych czujników, płyt rozszerzeń ani innych modułów do interfejsów GPIO, I²C, UART czy innych portów, gdy robot jest włączony. Wszystkie prace z dodatkowym sprzętem, użytecznym obciążeniem i zewnętrznymi modułami należy wykonywać tylko po całkowitym wyłączeniu urządzenia.
- Testowanie nowych scenariuszy. Nie uruchamiaj nieprzetestowanych algorytmów chodzenia, manipulacji lub balansowania w pobliżu ludzi, zwierząt, szklanych powierzchni, stoisk czy drogiego sprzętu. Pierwsze testy przeprowadzaj w wolnej strefie z wystarczającą przestrzenią wokół robota i możliwością szybkiego zatrzymania wykonania polecenia.
- Mechaniczna ingerencja podczas ruchu. Nie dotykaj przegubów, dłoni, węzłów kolanowych, napędów barkowych i ruchomych części podczas pracy robota. Napędy Unitree G1 Edu Pro E-U11 mają wysoki moment obrotowy, więc fizyczna ingerencja podczas ruchu może być niebezpieczna dla użytkownika i samego sprzętu.
Kup Unitree G1 Edu Pro E-U11
Jeśli planujesz Unitree G1 Edu Pro E-U11 kupić do zadań badawczych lub edukacyjnych, sprawdź aktualną cenę Unitree G1, cennik i dostępne konfiguracje przed złożeniem zamówienia.



































 robot dostawczy i reklamowy")
 robot dostawczy i reklamowy")
