















- Dostępność: Na magazynie
- Kod produktu: 00-00014529
- Waga Brutto: 42.00kg

Więcej produktów tej marki




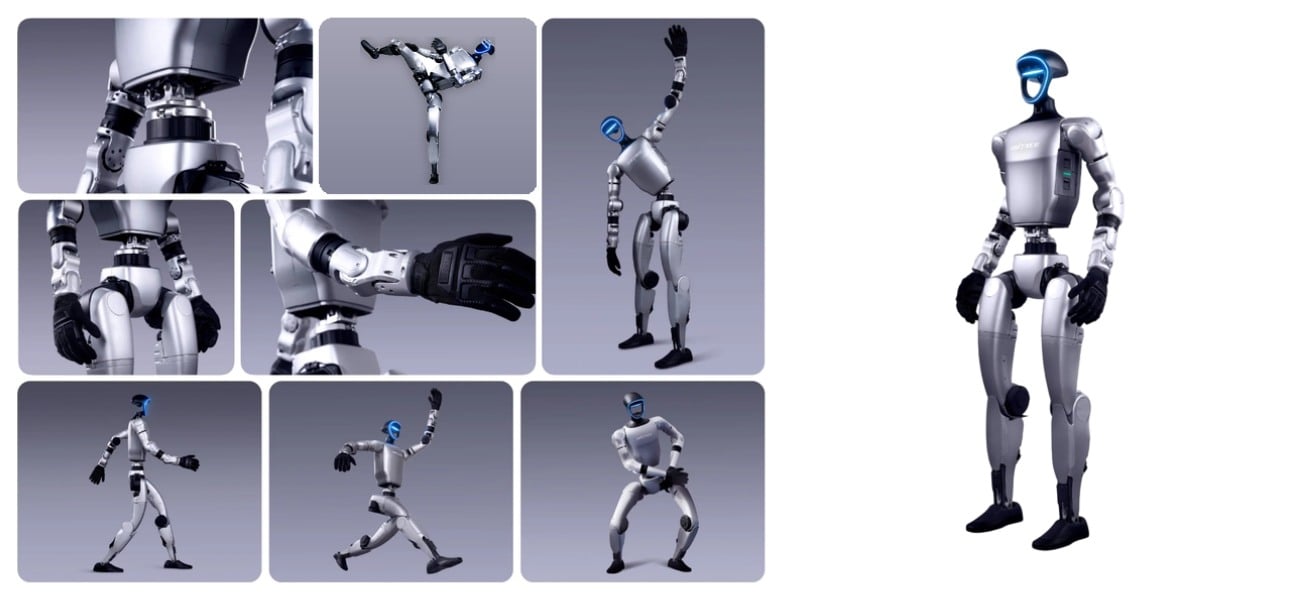
Unitree G1 Edu Pro B-U10 robot humanoidalny do badań naukowych
Unitree G1 Edu Pro B-U10 to robot humanoidalny przeznaczony do badań naukowych, nauczania, opracowywania algorytmów sztucznej inteligencji oraz eksperymentów z interakcją człowiek-robot, z 37 stopniami swobody, modułem obliczeniowym NVIDIA Jetson Orin NX 16GB oraz dwoma trójpalczastymi dłońmi Dex3-1 z kontrolą siły i czujnikami dotykowymi. Model wyposażony jest we wszystkie funkcje standardowej wersji G1 Edu oraz dodatkowo w dwie zręczne ręce Dex3-1 z trzema palcami, które mają wysoką zręczność i są sterowane siłą z dotykowym sprzężeniem zwrotnym. Robot wspiera rozwój wtórny i pracę z narzędziami ROS2 i SDK2, co pozwala na programowanie ruchów, nawigację i interakcję z obiektami w czasie rzeczywistym. Wyposażony w kamerę Intel RealSense D435i, 3D LiDAR i inne czujniki. Każda ręka ma 33 czujniki dotykowe i jest w stanie delikatnie pracować z przedmiotami dzięki hybrydowej kontroli siły.

Zalety Unitree G1 Edu Pro B-U10
- Stopień swobody i kinematyka humanoidalna. Robot humanoidalny ma 37 stopni swobody. Duże kąty ruchu stawów rąk, nóg i tułowia zapewniają wykonywanie skomplikowanych manipulacji, balansowanie i poruszanie się w warunkach projektów badawczych.
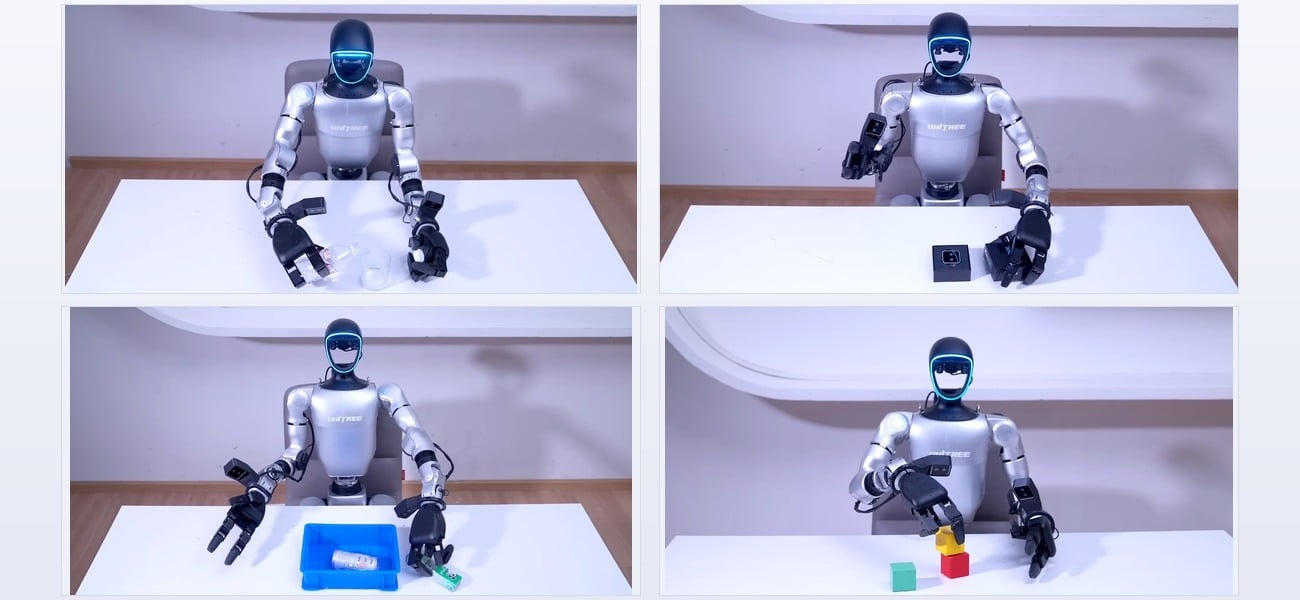
- Humanoidalne dłonie Dex3-1. Model wyposażony jest w dwie trójpalczaste dłonie Dex3-1 z regulowaną kontrolą siły i 33 czujnikami dotykowymi na każdej ręce. Manipulatory wspierają precyzyjną pracę z delikatnymi przedmiotami, zbierają dane o sile nacisku w czasie rzeczywistym i zapewniają precyzyjne chwytanie obiektów.
- Wysoka moc obliczeniowa. Moduł pokładowy NVIDIA Jetson Orin NX 16GB ponad 100 TOPS jest zoptymalizowany do przetwarzania widzenia komputerowego, nauki symulacyjnej i metod z wzmocnieniem RL. Działa z multimodalnymi modelami AI UnifoLM.
- Wszechstronne postrzeganie przestrzeni. Widok 360° zapewniają firmowy lidar Unitree 4D LiDAR-L1, kamera głębi Intel RealSense D435i oraz dodatkowy 3D LiDAR do nawigacji i 3D SLAM. Zestaw 4 mikrofonów odpowiada za rozpoznawanie poleceń. To pozwala na budowanie trójwymiarowych map pomieszczeń, rozpoznawanie przeszkód i pracę z komendami głosowymi.
- Elastyczne programowanie. Otwarty pełny niski i wysoki poziom kontroli nad napędami przez unitree_sdk2 (C++/Python). Robot jest w pełni kompatybilny z ROS2 i posiada gotowe cyfrowe modele URDF do symulacji w Gazebo i Isaac Sim, co ułatwia testowanie algorytmów przed uruchomieniem na rzeczywistym sprzęcie.
- Niezawodna mechanika siłowa. Napędy kolanowe rozwijają moment obrotowy do 120 Nm, a przemysłowe łożyska wałeczkowe są przeznaczone do długotrwałej eksploatacji. Wyjmowana bateria 9000 mAh zapewnia do 2 godzin pracy autonomicznej, a składana obudowa 690x450x300 mm ułatwia transport między laboratoriami i centrami szkoleniowymi.
- Oficjalna gwarancja. Na zrobotyzowany kompleks serii Edu obowiązuje gwarancja na 18 miesięcy, co zapewnia pełne wsparcie techniczne i serwis.
Konstrukcja i część sprzętowa
Zrobotyzowana platforma ma stabilną architekturę o wysokości 1320 mm i całkowitej wadze około 35 kg, która jest przeznaczona do długotrwałych eksperymentów i intensywnych obciążeń dynamicznych. Ruchome węzły kolan są wyposażone w wydajne silniki z magnesami trwałymi (PMSM) o niskiej inercji, które generują moment obrotowy do 120 Nm dla natychmiastowej stabilizacji pozycji ciała, biegu lub pokonywania przeszkód.
Duże kąty odchylenia stawów biodrowych, kolanowych i lędźwiowych pozwalają na realizację skomplikowanych scenariuszy ruchu, niedostępnych dla większości innych platform humanoidalnych. Wszystkie ruchome połączenia mechanizmu są wyposażone w przemysłowe łożyska wałeczkowe krzyżowe dla wysokiej precyzji pozycjonowania. Okablowanie jest ukryte wewnątrz pustych elementów ramy, co w pełni chroni linie komunikacyjne przed mechanicznym zużyciem. Ważną zaletą inżynieryjną jest obecność wbudowanego w głowę głośnika o mocy 5 W, który wraz z zestawem mikrofonów zapewnia pełnowartościową dwukierunkową komunikację głosową. Dla wygodnego transportu między laboratoriami lub salami wykładowymi obudowa składa się do kompaktowych wymiarów — 690×450×300 mm.
Precyzyjna praca z przedmiotami dzięki elastyczności
Unitree G1 Edu Pro B-U10 wyposażony jest w dwie trójpalczaste dłonie Dex3-1 z kontrolą siły i 33 czujnikami dotykowymi na każdej ręce. Dłonie są zręcznymi rękami z dotykowym odczuciem i są w pełni kompatybilne z wszystkimi funkcjami standardowej wersji Edu. Główną cechą jest zintegrowana hybrydowa kontrola siły i pozycji stawów, dzięki czemu urządzenie precyzyjnie oblicza siłę interakcji z otoczeniem. To pozwala robotowi delikatnie pracować z przedmiotami o różnych kształtach geometrycznych, gęstości i kruchości — szklanymi naczyniami, narzędziami i innymi obiektami.
Anatomiczna struktura manipulatorów wspiera zbieranie danych o sile nacisku i oporze materiału w czasie rzeczywistym, co pomaga badaczom opracowywać precyzyjne scenariusze chwytania. Dłonie Dex3-1 zapewniają wysoką precyzję i czułość dzięki 33 czujnikom dotykowym na każdej ręce.
Centrum sterowania i platforma obliczeniowa
Dla inżynierów i programistów w Unitree G1 Edu Pro B-U10 otwarty jest pełny niski i wysoki poziom kontroli nad napędami i czujnikami przez otwarty interfejs unitree_sdk2 w językach programowania C++ i Python. Pełna integracja z systemem operacyjnym ROS2 ułatwia podłączanie zewnętrznych modułów programowych i wtyczek. Obecność szczegółowych cyfrowych modeli URDF pozwala na uruchamianie dokładnej symulacji fizycznego zachowania humanoida w wirtualnych środowiskach Gazebo i NVIDIA Isaac Sim przed testowaniem algorytmów na rzeczywistym sprzęcie.
Na plecach robota przewidziano standaryzowane otwory do pewnego mocowania dodatkowego sprzętu. Do podłączania zewnętrznych czujników i ładunku użytkowego wyprowadzono linie zasilania o różnym napięciu na 12V, 24V i 58V, a także szybkie interfejsy inżynieryjne: porty Gigabit Ethernet RJ45, USB-C oraz przemysłowe magistrale GPIO, I²C i UART.
Inteligentne czujniki do precyzyjnego rozpoznawania obiektów
Orientacja przestrzenna i budowa map w trójwymiarowej przestrzeni opiera się na kompleksowym połączeniu nowoczesnych czujników widzenia maszynowego. W głowie robota zintegrowano firmowy lidar okrężny Unitree 4D LiDAR-L1, który wykonuje 21 600 skanów laserowych na sekundę, zapewniając precyzyjne skanowanie otoczenia bez martwych stref.
System percepcji uzupełnia kamera głębi RGB-D Intel RealSense D435i oraz dodatkowy dalekosiężny 3D LiDAR. Taki hybrydowy zestaw czujników pozwala robotowi bez opóźnień budować mapy 3D za pomocą technologii SLAM, rozpoznawać obiekty na drodze i dynamicznie omijać przeszkody. Za odbiór i analizę informacji akustycznych odpowiada zestaw 4 wbudowanych mikrofonów, za pomocą których realizowane są algorytmy precyzyjnej lokalizacji źródła dźwięku w pomieszczeniu oraz rozpoznawania poleceń głosowych użytkownika.
Platforma edukacyjna do rozwoju AI i testowania autonomicznego zachowania
Głównym węzłem obliczeniowym Unitree G1 Edu Pro B-U10 jest komputer pokładowy oparty na module NVIDIA Jetson Orin NX o pojemności 16 GB. Z mocą obliczeniową ponad 100 TOPS platforma jest idealnie zoptymalizowana do lokalnego przetwarzania ciężkich sieci neuronowych i algorytmów widzenia komputerowego bezpośrednio na pokładzie robota.
Model wspiera zaawansowane metody uczenia maszynowego — uczenie symulacyjne (na podstawie działań operatora człowieka) oraz trening z wzmocnieniem (Reinforcement Learning). Możliwości programowe i wzorce ruchów są regularnie aktualizowane za pomocą bezprzewodowych pakietów OTA. Sprzęt jest w pełni dostosowany do lokalnej pracy z dużymi multimodalnymi modelami sztucznej inteligencji UnifoLM. To pozwala na programowanie całkowicie autonomicznego zachowania robota, rozpoznawanie skomplikowanych sekwencyjnych poleceń inżynieryjnych oraz interakcję z ludźmi bez konieczności stałego podłączenia do serwerów chmurowych.
Obszary zastosowania
Unitree G1 Edu Pro B-U10 został stworzony do projektów naukowych i edukacyjnych. Platforma pozwala na przeprowadzanie eksperymentów z autonomiczną mobilnością, niskopoziomową kontrolą napędów oraz sterowaniem manipulatorami w takich kierunkach:
- Badania naukowe i R&D: opracowywanie algorytmów sztucznej inteligencji, testowanie metod uczenia z wzmocnieniem (Reinforcement Learning) oraz modelowanie interakcji człowiek-maszyna.
- Nawigacja i percepcja przestrzeni: badania nad autonomiczną nawigacją, widzeniem komputerowym, budowaniem trójwymiarowych map pomieszczeń oraz algorytmami SLAM.
- Manipulacja i sterowanie ruchem: opracowywanie precyzyjnego chwytania przedmiotów z wykorzystaniem dotykowych dłoni Dex3-1, testowanie wzorców chodzenia oraz algorytmów dynamicznego sterowania ruchem.
- Edukacja i zastosowanie praktyczne: nauczanie studentów robotyki i mechatroniki, przeprowadzanie projektów laboratoryjnych na uniwersytetach oraz projektowanie robotów serwisowych.
Zgodność z platformami edukacyjnymi
Unitree G1 Edu Pro B-U10 jest dostosowany do użytku na uniwersytetach, w laboratoriach badawczych i centrach szkoleniowych. Otwarta architektura ułatwia integrację z dodatkowym sprzętem i kompleksami programowymi.
Robot humanoidalny wspiera pracę z:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- zewnętrznymi kamerami;
- dodatkowymi czujnikami LiDAR;
- laboratoryjnymi systemami zbierania danych;
- platformami badawczymi uczenia maszynowego;
- urządzeniami sieciowymi Ethernet;
- modułami GPIO i sprzętem peryferyjnym.
Dzięki standaryzowanym interfejsom podłączenia platforma łatwo adaptuje się do różnych projektów naukowych i edukacyjnych. Obecność dokumentacji technicznej i narzędzi dla programistów pozwala szybko rozpocząć pracę nad własnymi zadaniami badawczymi.
Kompletacja
Urządzenie dostarczane jest w stanie zmontowanym i gotowe do pierwszego uruchomienia po rozpakowaniu. Do podstawowego zestawu wchodzą wszystkie niezbędne elementy do autonomicznego zasilania i bezprzewodowego sterowania.
- Robot humanoidalny Unitree G1 Edu.
- Szybko zdejmowana bateria litowa o pojemności 9000 mAh.
- Ładowarka sieciowa o parametrach 54 V, 5 A.
- Bezprzewodowy pilot ręczny.
- Instrukcja obsługi i paszport techniczny.
Specyfikacje techniczne Unitree G1 EDU
| Parametr | Wartość |
| Wymiary w pozycji roboczej | 1320x450x200 mm |
| Wymiary w pozycji złożonej | 690x450x300 mm |
| Waga netto z baterią | Około 35 kg |
| Liczba stopni swobody (DOF) | 37 DoF |
| Stopnie swobody jednej nogi | 6 |
| Stopnie swobody tułowia | 1 |
| Stopnie swobody jednej ręki | 5 (w tym dłoń Dex3-1) |
| Typ dłoni-manipulatorów | 2x Dex3-1 force controlled three finger dexterous hands (tactile) |
| Czujniki dotykowe | 33 na każdą rękę |
| Maksymalne obciążenie ręki | Do 3 kg |
| Maksymalny moment obrotowy stawu kolanowego | 120 Nm |
| Łożyska stawów | Przemysłowe łożyska wałeczkowe krzyżowe |
| Typ napędów | PMSM z wewnętrznym wirnikiem, niską inercją i wysoką prędkością |
| Obrót tułowia (oś Z) | ±155° |
| Pochylenie tułowia (oś X) | ±30° |
| Pochylenie tułowia (oś Y) | ±30° |
| Ruch stawu kolanowego | 0° ~ 165° |
| Staw biodrowy (Pitch) | ±154° |
| Staw biodrowy (Roll) | -30° ~ +170° |
| Staw biodrowy (Yaw) | ±158° |
| Nadgarstek (Pitch) | ±92,5° |
| Nadgarstek (Yaw) | ±92,5° |
| Pusta wewnętrzna prowadzenie przez stawy | Tak |
| Enkodery stawów | Podwójne enkodery |
| System chłodzenia | Lokalne chłodzenie powietrzem |
| Typ baterii | Bateria litowa 13S |
| Pojemność baterii | 9000 mAh |
| Wyjmowana bateria | Tak (obsługa gorącej wymiany) |
| Czas pracy autonomicznej | Do 2 godzin |
| Ładowarka | 54 V, 5 A |
| Podstawowa platforma obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Moduł wysokowydajnych obliczeń | NVIDIA Jetson Orin NX 16GB |
| Czujniki percepcji środowiska | Kamera głębi Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Zestaw mikrofonów | 4 zintegrowane mikrofony |
| Wbudowany głośnik | 5 W |
| Interfejsy bezprzewodowe | Wi-Fi 6, Bluetooth 5.2 |
| Dostęp do interfejsów sprzętowych | Dwa porty Gigabit Ethernet (RJ45), 4 x USB-C, magistrale GPIO, I²C, UART |
| Wyjścia zasilania | 12V, 24V, 58V |
| Środowiska programowe | ROS 2, Python, C++, unitree_sdk2, modele URDF |
| Rozwój wtórny | W pełni wspierany |
| Aktualizacje OTA | Wspierane |
| Gwarancja producenta | 18 miesięcy |
Co należy zrobić przed rozpoczęciem i w trakcie pracy
- Kontrola zasilania: Przed każdym uruchomieniem należy sprawdzić poziom naładowania baterii, aby uniknąć nagłego wyłączenia robota podczas wykonywania ruchów.
- Przygotowanie powierzchni: Używaj wyłącznie płaskiej, suchej i nieśliskiej powierzchni do opracowywania algorytmów chodzenia, stabilizacji i balansowania.
- Aktualizacja systemu: Regularnie aktualizuj oprogramowanie i pakiety umiejętności ruchowych za pomocą oficjalnych narzędzi bezprzewodowych (OTA) od Unitree.
- Ekosystem rozwoju: Do tworzenia własnych algorytmów, symulacji i rozwoju wtórnego zaleca się stosowanie oficjalnych środowisk ROS2 i unitree_sdk2.
Surowe ograniczenia i bezpieczeństwo
- Uruchomienie bez podparcia. Nie wolno włączać zasilania Unitree G1 Edu, gdy leży na ziemi lub znajduje się w niestabilnej pozycji bez wsparcia. Pierwsze uruchomienie i kalibracja powinny odbywać się tylko na ochronnym stojaku wiszącym lub specjalnym krześle.
- Brutalne montowanie baterii. Unikaj wciskania baterii do kadłuba z użyciem nadmiernej siły fizycznej. Jeśli blok nie wchodzi płynnie w rowki do kliknięcia, natychmiast przerwij proces, aby nie uszkodzić wewnętrznych złącz zasilania.
- Programowanie bez trybu Debug. Zabrania się wysyłania własnych poleceń przez SDK bez wcześniejszego przełączenia robota w tryb rozwoju (L2 + R2). Zlekceważenie tej zasady powoduje twardy konflikt z wbudowanym kontrolerem ruchów, co prowadzi do silnego drżenia (jitter) i uszkodzenia napędów.
- Przekroczenie obciążenia. Nie wolno obciążać robotycznych dłoni Dex3-1 wagą ponad 3 kg. Przeciążenie prowadzi do krytycznego przegrzania serwonapędów i awarii przekładni.
- Gorące podłączanie czujników. Wyklucza się podłączanie lub odłączanie zewnętrznych czujników i modułów rozszerzeń do interfejsów GPIO, I²C, UART na plecach robota, gdy system jest włączony i na porty podawane jest napięcie. Wszystkie manipulacje z ładunkiem użytkowym wykonuje się tylko na urządzeniu bez zasilania.
Kup Unitree G1 Edu Pro B-U10 w Polsce
Jeśli planujesz Unitree G1 Edu Pro B-U10 kupić do celów badawczych lub edukacyjnych, sprawdź aktualną cenę Unitree G1, cennik i dostępne konfiguracje przed złożeniem zamówienia.



































 robot dostawczy i reklamowy")
 robot dostawczy i reklamowy")
