

















- Stock: Auf Lager
- Artikelnummer: 00-00014530
- Bruttogewicht: 42.00kg

Weitere Produkte dieser Marke




Unitree G1 Edu Pro E-U11 humanoider Roboter für robotische Forschung und Bildung
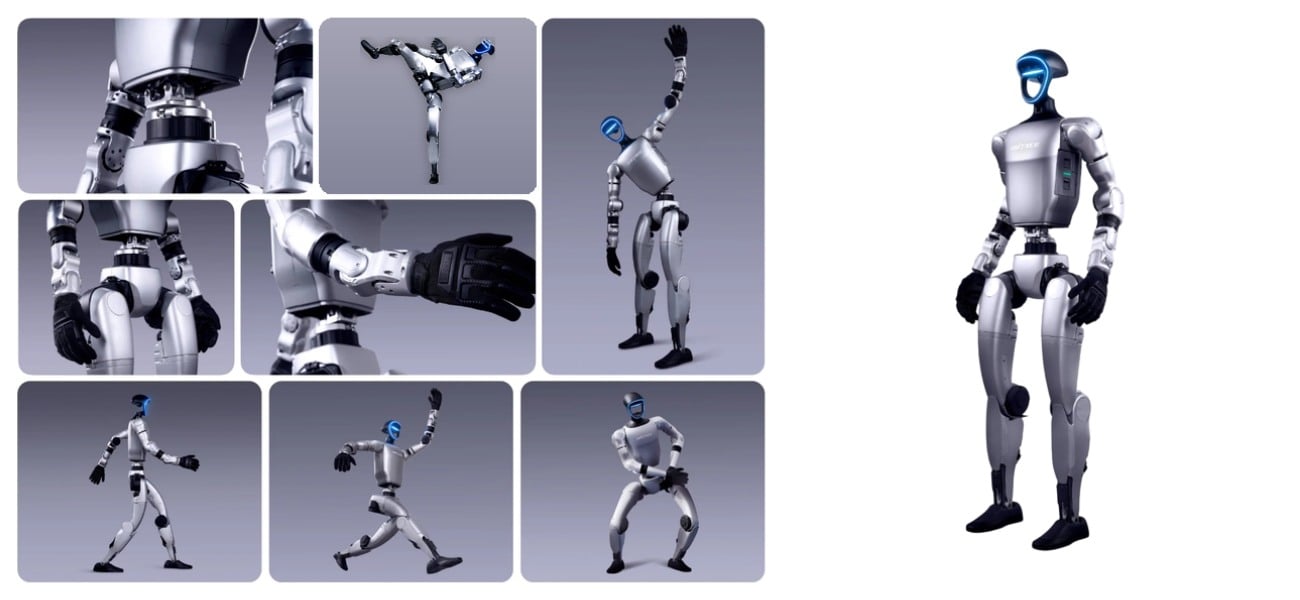
Unitree G1 Edu Pro E-U11 — ist ein humanoider Roboter für Forschung, Entwicklung von KI-Algorithmen und Bildungsprojekte, mit 35 Freiheitsgraden, zwei robotischen Revo 2 Basic Händen und zwei hochleistungsfähigen Rechenmodulen. Das Modell ist für Universitäten, Forschungslabore, F&E-Teams, Bildungszentren und innovative Abteilungen von Unternehmen konzipiert, die an Aufgaben der Bewegung, Navigation, Interaktion mit Objekten und autonomem Verhalten von Robotern arbeiten. Die Plattform kann auch für Vorführungen auf Messen, Konferenzen, Technologieforen und Firmenveranstaltungen verwendet werden, bei denen die Möglichkeiten der modernen humanoiden Robotik gezeigt werden sollen. Das Gerät unterstützt alle Funktionen der Version Unitree G1 Edu Standard Edition.

Hauptvorteile des Unitree G1 Edu Pro E-U11
- 35 Freiheitsgrade. Diese Konfiguration ermöglicht es, komplexe Bewegungsszenarien zu üben und menschenähnliche Kinematik zu erforschen.
- Zwei robotische Revo 2 Basic Hände. Die fünfgliedrige Konstruktion eignet sich zum Testen von Algorithmen für das Greifen und Manipulieren von Objekten unterschiedlicher Form.
- Zwei hochleistungsfähige Rechenmodule. Die Rechenressourcen können für Steuerungsalgorithmen, maschinelles Lernen und Experimente mit künstlicher Intelligenz eingesetzt werden.
- Plattform für die Entwicklung von KI. Der Roboter ermöglicht die Erforschung von autonomem Verhalten, Bewegungsplanung und Interaktion mit der Umgebung.
- Training von Bewegungen, Navigation und Arbeit mit Objekten. Der humanoide Roboter kann für die Übung praktischer Szenarien in der Robotik und wissenschaftlichen Projekten verwendet werden.
- 18 Monate Garantie. Die Garantiezeit gilt für den Unitree G1 Edu Pro E-U11.
- Plattform für Bildung und Forschung. Der Unitree G1 Edu Pro E-U11 eignet sich für Universitäten, Forschungslabore, Innovationszentren und Teams, die an robotischen Projekten arbeiten.
Konstruktion und Bewegungsmöglichkeiten
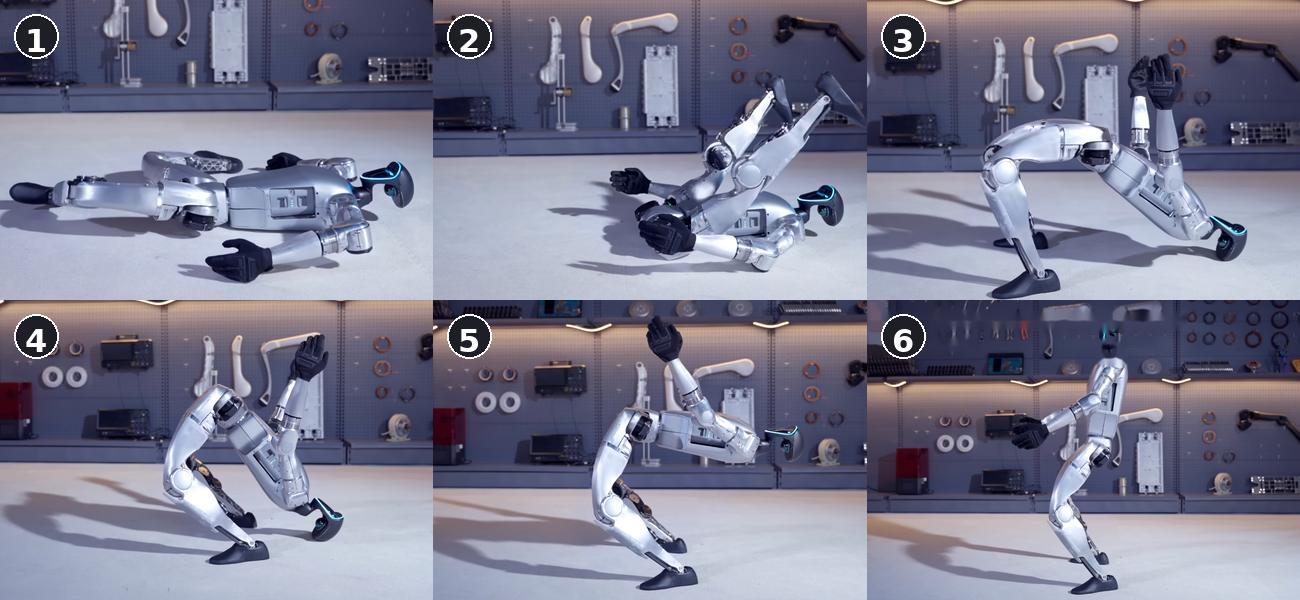
Der humanoide Roboter Unitree ist nach einem menschenähnlichen Schema mit beweglichen Arm-, Bein- und Körpergelenken gebaut. Die Konstruktion ermöglicht das Üben von Aufgaben wie Balance, Fortbewegung und Koordination der Bewegungen.
Die 35 Freiheitsgrade schaffen Bedingungen für die Erforschung komplexer Bewegungstrajektorien und der Interaktion zwischen einzelnen Gelenken. Diese Architektur ist nützlich beim Erlernen von Steuerungsalgorithmen und der Bewertung des Verhaltens humanoider Roboter in verschiedenen Szenarien.
Arme und Beine arbeiten als ein einziges kinematisches System, das die Erforschung von Bewegungen ermöglicht, die den menschlichen Bewegungen nahekommen. Dies ist wichtig für Bildungsprogramme, Robotikkurse und Experimente mit Mobilität.
Robotische Revo 2 Basic Hände
Unitree G1 Edu Pro E-U11 ist mit zwei fünfgliedrigen robotischen Revo 2 Basic Händen ausgestattet. Sie sind für die Arbeit mit Objekten und das Testen von Greifalgorithmen konzipiert.
Die robotischen Revo 2 Basic Hände ermöglichen die Erforschung verschiedener Interaktionsmöglichkeiten mit Objekten, einschließlich Halten, Tragen und Positionsänderung von Gegenständen. Diese Fähigkeiten sind nützlich für das Training von Robotern im Umgang mit Händen und die Datenerfassung für maschinelle Lernalgorithmen.
Die Anwesenheit von zwei Händen ermöglicht auch die Modellierung von Szenarien der beidseitigen Manipulation, die häufig in der Forschung zur humanoiden Robotik verwendet werden.
Rechenfähigkeiten und KI-Entwicklung
Der humanoide Roboter Unitree G1 Edu Pro E-U11 ist mit zwei hochleistungsfähigen Rechenmodulen ausgestattet. Sie können für die Entwicklung und das Testen von Steuerungsalgorithmen, maschinellem Lernen und autonomem Verhalten eingesetzt werden.
Die Plattform eignet sich für Aufgaben, die mit der Erforschung von Bewegungen, Navigation und der Analyse der Interaktion des Roboters mit der Umgebung verbunden sind. Der Roboter für die KI-Entwicklung kann in Ausbildungskursen, Laborarbeiten und Forschungsprojekten verwendet werden, bei denen eine reale humanoide Plattform zur Überprüfung von Algorithmen erforderlich ist.
Da für dieses Modell in der bereitgestellten Quelle keine Liste der Software-Tools bestätigt wurde, erfordert die Information über die Unterstützung spezifischer Entwicklungsplattformen eine zusätzliche Klärung vor der Bestellung.
Kompatibilität mit Bildungsplattformen
Unitree G1 Edu Pro E-U11 ist für den Einsatz in Universitäten, Forschungslabors und Bildungszentren angepasst. Die offene Architektur erleichtert die Integration mit zusätzlicher Hardware und Softwarekomplexen.
Der humanoide Roboter unterstützt die Arbeit mit:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- externen Kameras;
- zusätzlichen LiDAR-Sensoren;
- Labor-Datenerfassungssystemen;
- Forschungsplattformen für maschinelles Lernen;
- Netzwerk-Ethernet-Geräten;
- GPIO-Modulen und Peripheriegeräten.
Dank standardisierter Schnittstellen lässt sich die Plattform leicht an verschiedene wissenschaftliche und Bildungsprojekte anpassen. Die Verfügbarkeit von technischer Dokumentation und Entwickler-Tools ermöglicht es, schnell mit der Arbeit an eigenen Forschungsaufgaben zu beginnen.
Anwendungsbereiche
Der Unitree G1 Edu Pro E-U11 ist für Forschungs-, Bildungs- und Ingenieuraufgaben konzipiert, bei denen eine reale humanoide Plattform zur Überprüfung von Algorithmen und praktischen Szenarien der Roboterarbeit erforderlich ist. Das Modell kann sowohl in wissenschaftlichen Projekten als auch bei technologischen Demonstrationen, Messen, Produktionsforschung und öffentlichen Veranstaltungen eingesetzt werden.
- Universitäten: Ausbildung von Studenten in Robotik, Mechatronik und Steuerungssystemen.
- F&E-Labore: Testen neuer Bewegungs-, Navigations- und Interaktionsalgorithmen.
- Robotik: Erforschung menschenähnlicher Kinematik und Steuerung von Mehrgelenksystemen.
- Künstliche Intelligenz: Training und Überprüfung von Modellen für autonomes Roboterverhalten.
- Bildungszentren: Durchführung praktischer Übungen und Demonstrationen von Robotertechnologien.
- Forschung zur Mensch-Maschine-Interaktion: Untersuchung der Interaktionsmöglichkeiten von Menschen mit humanoiden Robotern.
- Testen autonomer Navigation: Üben von Algorithmen zur Orientierung und Fortbewegung in Innenräumen.
- Arbeit mit Objekten: Erforschung von Szenarien zum Greifen, Halten und Bewegen von Objekten.
- Technologische Messen und Demonstrationsveranstaltungen: Präsentation von Roboterentwicklungen, wissenschaftlichen Projekten und Bildungsprogrammen.
- Events und öffentliche Veranstaltungen: Demonstration der Möglichkeiten humanoider Roboter bei Konferenzen, Foren und thematischen Messen.
- Produktionsforschung: Überprüfung der Perspektiven des Einsatzes humanoider Roboter in unterstützenden Operationen und experimentellen Produktionsprozessen.
- Unternehmensinnovationszentren: Testen neuer Ansätze zur Automatisierung und Interaktion von Robotern mit Personal.
- Zentren für die Entwicklung neuer Technologien: Datenerfassung zur Erstellung und Verbesserung von Steuerungsalgorithmen für Roboter.
Um besser zu verstehen, wie der Unitree G1 Edu Pro E-U11 funktioniert, sehen Sie sich das Video unten an. Es zeigt die Bewegungen des Roboters, seine Fähigkeiten und Beispiele für den Einsatz in Bildung, Forschung, Algorithmentests und Demonstrationen.
Lieferumfang
Der Unitree G1 Edu Pro E-U11 wird montiert geliefert und ist nach Erhalt für die Erstkonfiguration vorbereitet. Der genaue Lieferumfang hängt von der Konfiguration ab und wird vor der Bestellung vereinbart.
- Humanoider Roboter Unitree G1 EDU — 1 Stk.
- Akku 9000 mAh — 1 Stk.
- Ladegerät 54 V 5 A — 1 Stk.
- Handcontroller — 1 Stk.
- Zusätzliches Rechenmodul (abhängig von der Konfiguration) — 1 Stk.
Technische Daten des Unitree G1 EDU Pro E-U11
| Parameter | Wert |
|---|---|
| Nettogewicht mit Akku | Ca. 35 kg |
| Anzahl der Freiheitsgrade (DOF) | 35 DoF |
| Freiheitsgrade eines Beins | 6 |
| Freiheitsgrade des Körpers | 1 |
| Freiheitsgrade eines Arms | 5 |
| Typ der Manipulatorhände | Revo 2 Basic (fünfgliedrig, menschenähnlich) |
| Abmessungen im zusammengeklappten Zustand | 690x450x300 mm |
| Abmessungen im Arbeitszustand | 1320x450x200 mm |
| Maximale Belastung eines Arms | Bis zu 3 kg |
| Maximales Drehmoment des Knies | 120 Nm |
| Gelenklager | Industrielle Kreuzrollenlager |
| Antriebstyp | PMSM mit Innenrotor, niedriger Trägheit und hoher Geschwindigkeit |
| Drehung des Körpers (Achse Z) | ±155° |
| Neigung des Körpers (Achse X) | ±30° |
| Neigung des Körpers (Achse Y) | ±30° |
| Bewegung des Knies | 0° ~ 165° |
| Hüftgelenk (Pitch) | ±154° |
| Hüftgelenk (Roll) | -30° ~ +170° |
| Hüftgelenk (Yaw) | ±158° |
| Handgelenk (Pitch) | ±92,5° |
| Handgelenk (Yaw) | ±92,5° |
| Leere interne Verkabelung durch die Gelenke | Ja |
| Gelenk-Encoder | Doppelte Encoder |
| Kühlsystem | Lokale Luftkühlung |
| Akku-Typ | Lithium-Akku 13S |
| Akku-Kapazität | 9000 mAh |
| Entfernbarer Akku | Ja (Hot-Swap-Unterstützung) |
| Betriebsdauer | Bis zu 2 Stunden |
| Ladegerät | 54 V, 5 A |
| Basis-Rechenplattform | 8-Kern-Hochleistungsprozessor |
| Hochleistungs-Rechenmodul | NVIDIA Jetson Orin NX 16GB |
| Umgebungssensoren | Tiefenkamera Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Mikrofonarray | 4 integrierte Mikrofone |
| Eingebauter Lautsprecher | 5 W |
| Drahtlose Schnittstellen | Wi-Fi 6, Bluetooth 5.2 |
| Zugriff auf Hardware-Schnittstellen | Zwei Gigabit-Ethernet-Ports (RJ45), 4 x USB-C, GPIO-Busse, I²C, UART |
| Stromausgänge | 12V, 24V, 58V |
| Software-Umgebungen | ROS 2, Python, C++, unitree_sdk2, URDF-Modelle |
| Sekundäre Entwicklung | Vollständig unterstützt |
| OTA-Updates | Unterstützt |
| Herstellergarantie | 18 Monate |
| Verwendungszweck | Akademische Forschung, künstliche Intelligenz, maschinelles Lernen, SLAM-Tests |
Warnhinweise zur Verwendung des Unitree G1 Edu Pro E-U11
- Start ohne Unterstützung. Schalten Sie den Unitree G1 Edu Pro E-U11 nicht ein, wenn der Roboter auf dem Boden liegt, geneigt ist oder sich in einer instabilen Position ohne Unterstützung befindet. Der erste Start, die Kalibrierung und das Testen der grundlegenden Bewegungen sollten auf einem Schutzaufhängeständer oder einem speziellen Stützstuhl durchgeführt werden.
- Falsche Installation des Akkus. Drücken Sie den Akku nicht mit übermäßiger Kraft in das Gehäuse. Wenn der Akku nicht reibungslos entlang der Führungsschienen zur Fixierung gleitet, stoppen Sie die Installation und überprüfen Sie seine Position. Eine gewaltsame Installation kann die Stromanschlüsse und internen Kontaktgruppen beschädigen.
- Programmierung ohne Entwicklungsmodus. Senden Sie keine eigenen Befehle über das SDK, ohne zuvor in den vom Hersteller vorgesehenen Entwicklungsmodus zu wechseln. Andernfalls kann es zu einem Konflikt zwischen externen Befehlen und dem eingebauten Bewegungscontroller kommen, was zu Ruckeln, Zittern der Antriebe, Stabilisationsfehlern oder mechanischen Schäden an den Baugruppen führen kann.
- Überlastung der Hände. Überschreiten Sie nicht die zulässige Belastung für die robotischen Revo 2 Basic Hände. Die Arbeit mit zu schweren Gegenständen kann zu einer Überhitzung der Servoantriebe, einem beschleunigten Verschleiß der Getriebe und einem Verlust der Greifgenauigkeit führen.
- Anschließen von Modulen unter Spannung. Schließen Sie keine externen Sensoren, Erweiterungsplatinen oder andere Module an die GPIO-, I²C-, UART- oder andere Ports an oder trennen Sie sie, während der Roboter eingeschaltet ist. Alle Arbeiten mit zusätzlicher Ausrüstung, Nutzlasten und externen Modulen sollten nur nach vollständiger Stromabschaltung des Geräts durchgeführt werden.
- Testen neuer Szenarien. Führen Sie keine ungeprüften Algorithmen für Gehen, Manipulation oder Balance in der Nähe von Personen, Tieren, Glasoberflächen, Ständen oder teurer Ausrüstung aus. Führen Sie die ersten Tests in einem freien Bereich mit ausreichend Platz um den Roboter herum durch und mit der Möglichkeit, die Ausführung des Befehls schnell zu stoppen.
- Mechanisches Eingreifen während der Bewegung. Berühren Sie während des Betriebs des Roboters keine Gelenke, Hände, Kniegelenke, Schulterantriebe und beweglichen Teile. Die Antriebe des Unitree G1 Edu Pro E-U11 haben ein hohes Drehmoment, daher kann ein physisches Eingreifen während der Bewegung für den Benutzer und das Gerät selbst gefährlich sein.
Kaufen Sie den Unitree G1 Edu Pro E-U11
Wenn Sie planen, den Unitree G1 Edu Pro E-U11 für Forschungs- oder Bildungszwecke zu kaufen, klären Sie den aktuellen Unitree G1 Preis, die Preisliste und die verfügbaren Konfigurationen vor der Bestellung.



































 Liefer- und Werberoboter")
 Liefer- und Werberoboter")
