















- Stock: Auf Lager
- Artikelnummer: 00-00014529
- Bruttogewicht: 42.00kg

Weitere Produkte dieser Marke




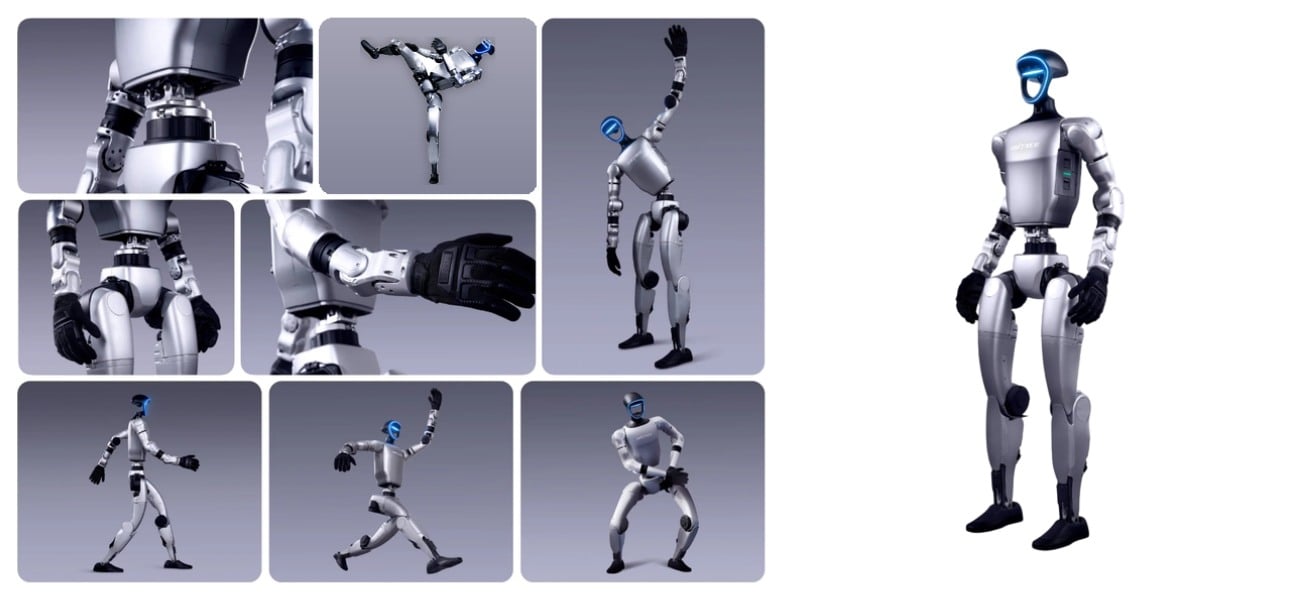
Unitree G1 Edu Pro B-U10 humanoider Roboter für wissenschaftliche Forschung
Unitree G1 Edu Pro B-U10 ist ein humanoider Roboter, der für wissenschaftliche Forschung, Bildung, die Entwicklung von KI-Algorithmen und Experimente zur Mensch-Roboter-Interaktion konzipiert ist, mit 37 Freiheitsgraden, einem NVIDIA Jetson Orin NX 16GB Rechenmodul und zwei dreifingrigen Dex3-1-Händen mit Kraftsteuerung und taktilen Sensoren. Das Modell ist mit allen Funktionen der Standardversion G1 Edu ausgestattet und verfügt zusätzlich über zwei Dexterous Hands Dex3-1, die mit drei Fingern eine hohe Geschicklichkeit aufweisen und mit taktilem Feedback gesteuert werden. Der Roboter unterstützt die sekundäre Entwicklung und die Arbeit mit ROS2- und SDK2-Tools, die es ermöglichen, Bewegungen, Navigation und Interaktion mit Objekten in Echtzeit zu programmieren. Ausgestattet mit einer Intel RealSense D435i-Kamera, 3D-LiDAR und anderen Sensoren. Jede Hand hat 33 taktile Sensoren und kann dank der hybriden Kraftsteuerung empfindlich mit Gegenständen umgehen.

Vorteile des Unitree G1 Edu Pro B-U10
- Freiheitsgrad und humanoide Kinematik. Der humanoide Roboter hat 37 Freiheitsgrade. Große Bewegungswinkel der Gelenke von Armen, Beinen und Rumpf ermöglichen die Durchführung komplexer Manipulationen, das Balancieren und die Fortbewegung in Forschungsprojekten.
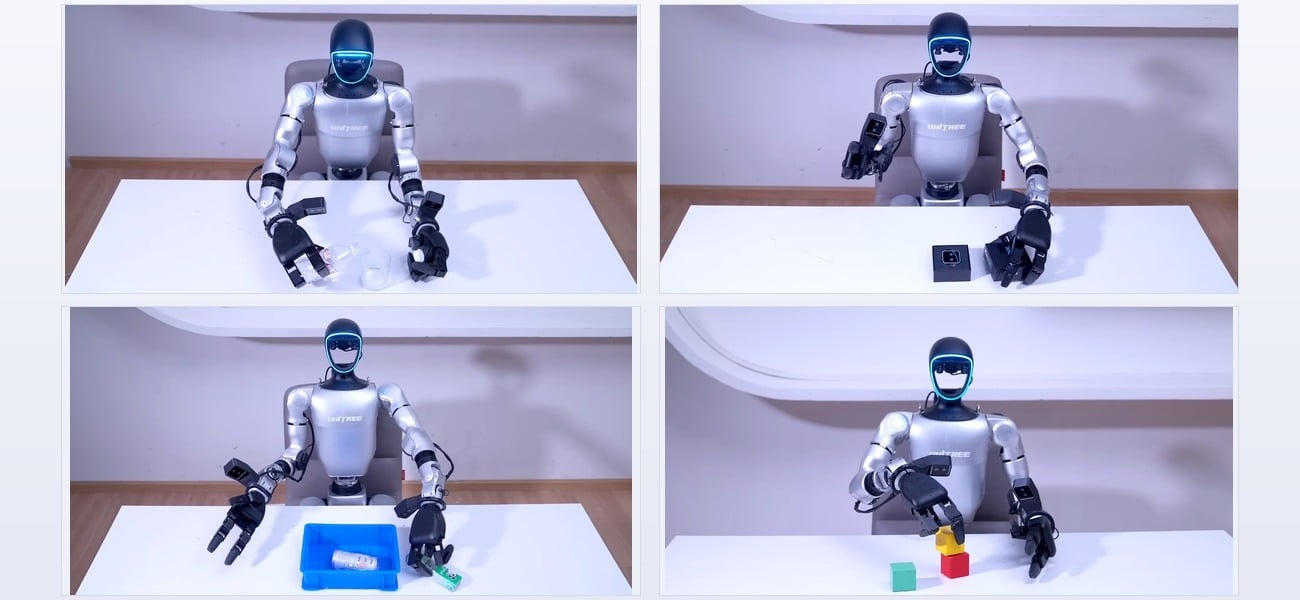
- Humanoide Hände Dex3-1. Das Modell ist mit zwei dreifingrigen Dex3-1-Händen mit kraftgesteuerter Steuerung und 33 taktilen Sensoren an jeder Hand ausgestattet. Die Manipulatoren unterstützen präzises Arbeiten mit zerbrechlichen Gegenständen, sammeln Echtzeitdaten über die Druckkraft und ermöglichen hochpräzises Greifen von Objekten.
- Hohe Rechenleistung. Das Onboard-Modul NVIDIA Jetson Orin NX 16GB mit über 100 TOPS ist für die Verarbeitung von Computer Vision, Simulationslernen und RL-Methoden optimiert. Es arbeitet mit multimodalen KI-Modellen UnifoLM.
- Umfassende Raumwahrnehmung. Ein 360°-Rundumblick wird durch den firmeneigenen LiDAR Unitree 4D LiDAR-L1, die Tiefenkamera Intel RealSense D435i und einen zusätzlichen 3D-LiDAR für Navigation und 3D-SLAM gewährleistet. Ein Array aus 4 Mikrofonen ist für die Erkennung von Befehlen zuständig. Dies ermöglicht den Bau von 3D-Karten von Räumen, die Erkennung von Hindernissen und die Arbeit mit Sprachbefehlen.
- Flexibles Programmieren. Vollständige offene Steuerung auf niedriger und hoher Ebene über unitree_sdk2 (C++/Python). Der Roboter ist vollständig kompatibel mit ROS2 und verfügt über fertige digitale URDF-Modelle zur Simulation in Gazebo und Isaac Sim, was das Testen von Algorithmen vor dem Einsatz auf realer Hardware erleichtert.
- Zuverlässige Kraftmechanik. Die Knieantriebe entwickeln ein Drehmoment von bis zu 120 Nm, und industrielle Rollenlager sind für den Langzeiteinsatz ausgelegt. Der abnehmbare 9000 mAh Akku bietet bis zu 2 Stunden Laufzeit, und das faltbare Gehäuse von 690x450x300 mm erleichtert den Transport zwischen Laboren und Bildungszentren.
- Offizielle Garantie. Auf das robotische Edu-System wird eine Garantie von 18 Monaten gewährt, die vollständigen technischen Support und Service bietet.
Konstruktion und Hardware
Die robotische Plattform hat eine stabile Architektur mit einer Höhe von 1320 mm und einem Gesamtgewicht von etwa 35 kg, die für langwierige Experimente und intensive dynamische Belastungen ausgelegt ist. Die beweglichen Kniegelenke sind mit hocheffizienten Permanentmagnet-Synchronmotoren (PMSM) mit geringer Trägheit ausgestattet, die ein Drehmoment von bis zu 120 Nm erzeugen, um die Körperhaltung, das Laufen oder das Überwinden von Hindernissen sofort zu stabilisieren.
Große Abweichungswinkel der Becken-, Knie- und Hüftgelenke ermöglichen die Umsetzung komplexer Bewegungsabläufe, die für die meisten anderen humanoiden Plattformen nicht zugänglich sind. Alle beweglichen Gelenke des Mechanismus sind mit industriellen Kreuzrollenlagern für hohe Positionierungsgenauigkeit ausgestattet. Die Verkabelung ist versteckt innerhalb der hohlen Rahmenelemente verlegt, was die Kommunikationsleitungen vollständig vor mechanischem Verschleiß schützt. Ein wichtiger ingenieurtechnischer Vorteil ist der integrierte 5-W-Lautsprecher im Kopf, der zusammen mit dem Mikrofonarray eine vollständige bidirektionale Sprachkommunikation ermöglicht. Für den bequemen Transport zwischen Laboren oder Hörsälen kann das Gehäuse auf kompakte Abmessungen von 690×450×300 mm zusammengeklappt werden.
Präzise Arbeit mit Gegenständen dank Flexibilität
Der Unitree G1 Edu Pro B-U10 ist mit zwei dreifingrigen Dex3-1-Händen mit Kraftsteuerung und 33 taktilen Sensoren an jeder Hand ausgestattet. Die Hände sind agile hand with tactile sensation und vollständig kompatibel mit allen Funktionen der Standardversion Edu. Das Hauptmerkmal ist die integrierte hybride Steuerung von Kraft und Gelenkposition, wodurch das Gerät die Interaktionskraft mit der Umgebung präzise berechnet. Dies ermöglicht es dem Roboter, empfindlich mit Gegenständen unterschiedlicher geometrischer Form, Dichte und Zerbrechlichkeit umzugehen - Glasgeschirr, Werkzeuge und andere Objekte.
Die anatomische Struktur der Manipulatoren unterstützt die Erfassung von Daten über Druckkraft und Materialwiderstand in Echtzeit, was Forschern hilft, präzise Greifszenarien zu entwickeln. Die Dex3-1-Hände bieten hohe Präzision und Empfindlichkeit dank 33 taktiler Sensoren an jeder Hand.
Steuerzentrum und Rechenplattform
Für Ingenieure und Entwickler bietet der Unitree G1 Edu Pro B-U10 vollständige Steuerung auf niedriger und hoher Ebene über die Antriebe und Sensoren über die offene Schnittstelle unitree_sdk2 in den Programmiersprachen C++ und Python. Die vollständige Integration mit dem Betriebssystem ROS2 vereinfacht die Anbindung von Drittanbieter-Softwaremodulen und Plugins. Die Verfügbarkeit detaillierter digitaler URDF-Modelle ermöglicht die genaue Simulation des physischen Verhaltens des Humanoiden in virtuellen Umgebungen wie Gazebo und NVIDIA Isaac Sim, bevor Algorithmen auf realer Hardware getestet werden.
Auf dem Rücken des Roboters sind standardisierte Öffnungen für die sichere Befestigung zusätzlicher Ausrüstung vorgesehen. Für den Anschluss von Fremdsensoren und Nutzlasten stehen Stromleitungen mit unterschiedlichen Spannungen von 12V, 24V und 58V sowie schnelle technische Schnittstellen zur Verfügung: Gigabit Ethernet RJ45-Ports, USB-C und industrielle Busse GPIO, I²C und UART.
Intelligente Sensoren zur genauen Objekterkennung
Die räumliche Orientierung und Kartenerstellung im dreidimensionalen Raum basiert auf einer komplexen Kombination moderner maschineller Sehsensoren. In den Kopf des Roboters ist der firmeneigene 360°-LiDAR Unitree 4D LiDAR-L1 integriert, der 21.600 Laserscans pro Sekunde durchführt und eine hochpräzise Umweltscannung ohne blinde Flecken gewährleistet.
Das Wahrnehmungssystem wird durch eine Tiefen-RGB-D-Kamera Intel RealSense D435i und einen zusätzlichen Langstrecken-3D-LiDAR ergänzt. Diese hybride Sensoranordnung ermöglicht es dem Roboter, ohne Verzögerung 3D-Karten mit der SLAM-Technologie zu erstellen, Objekte auf dem Weg zu erkennen und dynamisch Hindernisse zu umgehen. Für die Erfassung und Analyse akustischer Informationen ist ein Array aus 4 eingebauten Mikrofonen verantwortlich, mit denen Algorithmen zur genauen Lokalisierung der Schallquelle im Raum und zur Erkennung von Sprachbefehlen des Benutzers realisiert werden.
Bildungsplattform für die Entwicklung von KI und das Testen autonomer Verhaltensweisen
Der Hauptrechenknoten des Unitree G1 Edu Pro B-U10 ist ein Onboard-Computer auf Basis des NVIDIA Jetson Orin NX-Moduls mit 16 GB Kapazität. Mit einer Rechenleistung von über 100 TOPS ist die Plattform ideal für die lokale Verarbeitung schwerer neuronaler Netze und Computer-Vision-Algorithmen direkt an Bord des Roboters optimiert.
Das Modell unterstützt fortschrittliche Methoden des maschinellen Lernens - Simulationslernen (basierend auf den Aktionen des menschlichen Bedieners) und Verstärkungslernen (Reinforcement Learning). Softwarefähigkeiten und Bewegungsmuster werden regelmäßig über drahtlose OTA-Pakete aktualisiert. Die Hardware ist vollständig für die lokale Arbeit mit großen multimodalen KI-Modellen UnifoLM angepasst. Dies ermöglicht die Programmierung eines vollständig autonomen Verhaltens des Roboters, die Erkennung komplexer sequentieller technischer Befehle und die Interaktion mit Menschen, ohne dass eine ständige Verbindung zu Cloud-Servern erforderlich ist.
Anwendungsbereiche
Der Unitree G1 Edu Pro B-U10 wurde für wissenschaftliche und Bildungsprojekte entwickelt. Die Plattform ermöglicht Experimente mit autonomer Mobilität, niedrigstufiger Antriebssteuerung und Manipulatorsteuerung in folgenden Bereichen:
- Wissenschaftliche Forschung und F&E: Entwicklung von KI-Algorithmen, Testen von Verstärkungslernmethoden (Reinforcement Learning) und Modellierung der Mensch-Maschine-Interaktion.
- Navigation und Raumwahrnehmung: Erforschung autonomer Navigation, Computer Vision, Erstellung dreidimensionaler Raumkarten und SLAM-Algorithmen.
- Manipulation und Bewegungssteuerung: Üben des empfindlichen Greifens von Gegenständen mit taktilen Dex3-1-Händen, Testen von Gehmustern und Algorithmen zur dynamischen Bewegungssteuerung.
- Bildung und angewandte Anwendung: Ausbildung von Studenten in Robotik und Mechatronik, Durchführung von Universitätslaborprojekten und Entwurf von Servicerobotern.
Kompatibilität mit Bildungsplattformen
Der Unitree G1 Edu Pro B-U10 ist für den Einsatz in Universitäten, Forschungslaboren und Bildungszentren angepasst. Die offene Architektur vereinfacht die Integration mit zusätzlicher Hardware und Softwarekomplexen.
Der humanoide Roboter unterstützt die Arbeit mit:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- externen Kameras;
- zusätzlichen LiDAR-Sensoren;
- Laborsystemen zur Datenerfassung;
- Forschungsplattformen für maschinelles Lernen;
- Netzwerk-Ethernet-Geräten;
- GPIO-Modulen und Peripheriegeräten.
Dank standardisierter Anschluss-Schnittstellen lässt sich die Plattform leicht an verschiedene wissenschaftliche und Bildungsprojekte anpassen. Die Verfügbarkeit technischer Dokumentation und Entwicklerwerkzeuge ermöglicht einen schnellen Start der Arbeit an eigenen Forschungsaufgaben.
Lieferumfang
Das Gerät wird montiert geliefert und ist nach dem Auspacken bereit für den ersten Start. Das Basisset enthält alle notwendigen Elemente für die autonome Stromversorgung und die drahtlose Steuerung.
- Humanoider Roboter Unitree G1 Edu.
- Schnellwechsel-Lithium-Akku mit 9000 mAh Kapazität.
- Netzladegerät mit 54 V, 5 A.
- Drahtlose Handfernbedienung.
- Betriebsanleitung und technischer Pass.
Technische Spezifikationen des Unitree G1 EDU
| Parameter | Wert |
| Abmessungen im Arbeitszustand | 1320x450x200 mm |
| Abmessungen im zusammengeklappten Zustand | 690x450x300 mm |
| Nettogewicht mit Akku | Etwa 35 kg |
| Anzahl der Freiheitsgrade (DOF) | 37 DoF |
| Freiheitsgrade eines Beins | 6 |
| Freiheitsgrade des Körpers | 1 |
| Freiheitsgrade eines Arms | 5 (einschließlich Dex3-1-Hand) |
| Typ der Manipulatorhände | 2x Dex3-1 kraftgesteuerte dreifingrige geschickte Hände (taktil) |
| Taktilsensoren | 33 pro Hand |
| Maximale Belastung der Hand | Bis zu 3 kg |
| Maximales Drehmoment des Kniegelenks | 120 Nm |
| Gelenklager | Industrielle Kreuzrollenlager |
| Antriebstyp | PMSM mit Innenrotor, niedriger Trägheit und hoher Geschwindigkeit |
| Drehung des Körpers (Achse Z) | ±155° |
| Neigung des Körpers (Achse X) | ±30° |
| Neigung des Körpers (Achse Y) | ±30° |
| Bewegung des Kniegelenks | 0° ~ 165° |
| Hüftgelenk (Pitch) | ±154° |
| Hüftgelenk (Roll) | -30° ~ +170° |
| Hüftgelenk (Yaw) | ±158° |
| Handgelenk (Pitch) | ±92,5° |
| Handgelenk (Yaw) | ±92,5° |
| Versteckte interne Verkabelung durch Gelenke | Ja |
| Gelenk-Encoder | Doppel-Encoder |
| Kühlsystem | Lokale Luftkühlung |
| Akkutyp | Lithium-Akku 13S |
| Akkukapazität | 9000 mAh |
| Abnehmbarer Akku | Ja (Hot-Swap-Unterstützung) |
| Autonome Laufzeit | Bis zu 2 Stunden |
| Ladegerät | 54 V, 5 A |
| Basis-Rechenplattform | 8-Kern-Hochleistungsprozessor |
| Modul für Hochleistungsrechnen | NVIDIA Jetson Orin NX 16GB |
| Umgebungssensoren | Tiefenkamera Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Mikrofonarray | 4 integrierte Mikrofone |
| Eingebauter Lautsprecher | 5 W |
| Drahtlose Schnittstellen | Wi-Fi 6, Bluetooth 5.2 |
| Zugang zu Hardware-Schnittstellen | Zwei Gigabit-Ethernet-Ports (RJ45), 4 x USB-C, Busse GPIO, I²C, UART |
| Stromausgänge | 12V, 24V, 58V |
| Softwareumgebungen | ROS 2, Python, C++, unitree_sdk2, URDF-Modelle |
| Sekundäre Entwicklung | Vollständig unterstützt |
| OTA-Updates | Unterstützt |
| Herstellergarantie | 18 Monate |
Was vor und während der Arbeit zu tun ist
- Stromversorgungskontrolle: Überprüfen Sie vor jedem Start den Ladezustand des Akkus, um ein plötzliches Ausschalten des Roboters während der Bewegung zu vermeiden.
- Oberflächenvorbereitung: Verwenden Sie ausschließlich eine ebene, trockene und rutschfeste Oberfläche, um Geh-, Stabilitäts- und Balancealgorithmen zu üben.
- Systemaktualisierung: Aktualisieren Sie regelmäßig die Software und die Bewegungsfähigkeiten über die offiziellen drahtlosen Tools (OTA) von Unitree.
- Entwicklungsökosystem: Verwenden Sie die offiziellen ROS2- und unitree_sdk2-Umgebungen zur Erstellung eigener Algorithmen, Simulationen und sekundären Entwicklungen.
Strenge Einschränkungen und Sicherheit
- Start ohne Unterstützung. Es ist nicht erlaubt, den Unitree G1 Edu einzuschalten, wenn er auf dem Boden liegt oder sich in einer instabilen Position ohne Unterstützung befindet. Der erste Start und die Kalibrierung müssen nur auf einem Schutzgestell oder einem speziellen Stuhl erfolgen.
- Grobe Installation des Akkus. Vermeiden Sie das Einsetzen des Akkus in den Rumpf mit übermäßiger physischer Kraft. Wenn der Block nicht reibungslos in die Schlitze einrastet, stoppen Sie den Vorgang sofort, um die internen elektrischen Anschlüsse nicht zu beschädigen.
- Programmierung ohne Debug-Modus. Es ist verboten, eigene Befehle über das SDK zu senden, ohne den Roboter vorher in den Entwicklungsmodus (L2 + R2) zu versetzen. Die Missachtung dieser Regel führt zu einem harten Konflikt mit dem eingebauten Bewegungscontroller, was zu starkem Zittern (Jitter) und Antriebsschäden führt.
- Überlastung. Es ist nicht erlaubt, die robotischen Dex3-1-Hände mit einem Gewicht von mehr als 3 kg zu belasten. Eine Überlastung führt zu einer kritischen Überhitzung der Servoantriebe und zum Ausfall der Getriebe.
- Heißes Anschließen von Sensoren. Es ist ausgeschlossen, Fremdsensoren und Erweiterungsmodule an die GPIO-, I²C-, UART-Schnittstellen auf dem Rücken des Roboters anzuschließen oder abzutrennen, wenn das System eingeschaltet ist und Spannung an die Ports angelegt wird. Alle Manipulationen mit der Nutzlast werden nur an einem stromlosen Gerät durchgeführt.
Kaufen Sie Unitree G1 Edu Pro B-U10
Wenn Sie planen, Unitree G1 Edu Pro B-U10 für Forschungs- oder Bildungszwecke zu kaufen, klären Sie den aktuellen Unitree G1 Preis, die Preisliste und die verfügbaren Konfigurationen, bevor Sie die Bestellung aufgeben.



































 Liefer- und Werberoboter")
 Liefer- und Werberoboter")
