















- Доступність: В наявності
- Код товару: 00-00014529
- Вага Брутто: 42.00kg

Більше товарів цього бренду




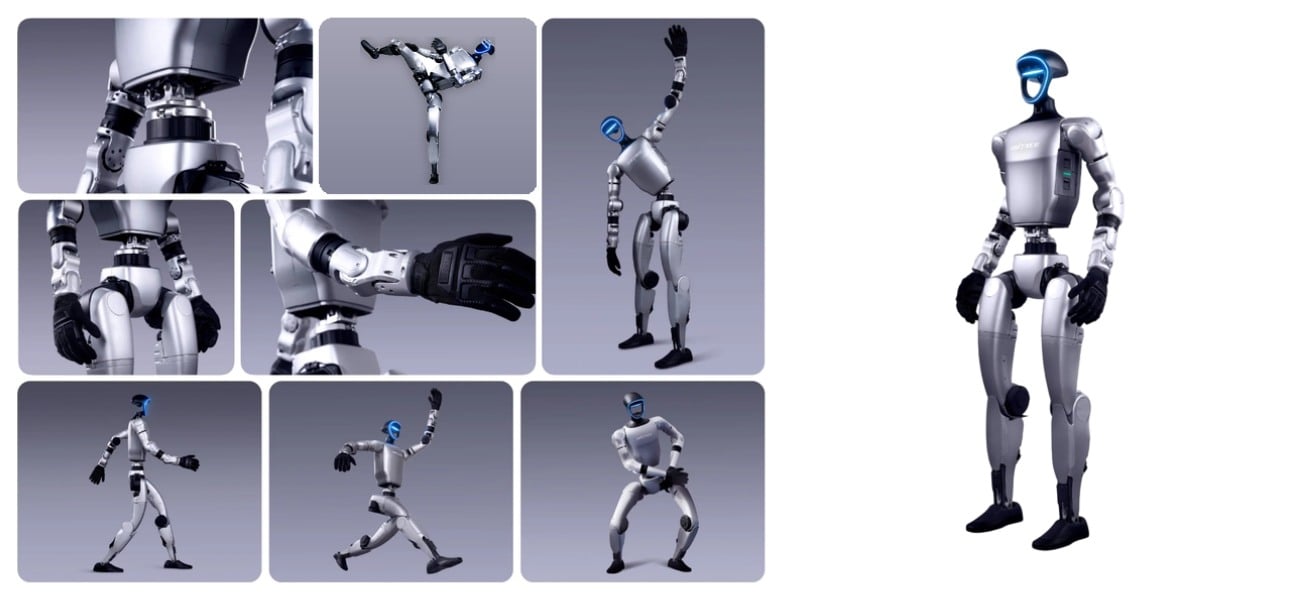
Unitree G1 Edu Pro B-U10 робот-гуманоїд для наукових досліджень
Unitree G1 Edu Pro B-U10 — це робот гуманоїд, призначений для наукових досліджень, навчання, розробки алгоритмів штучного інтелекту та експериментів із взаємодією людини й робота, з 37 ступенями свободи, обчислювальним модулем NVIDIA Jetson Orin NX 16GB та двома трипалими кистями Dex3-1 з силовим керуванням і тактильними сенсорами. Модель оснащена всіма можливостями стандартної версії G1 Edu та додатково двома Dexterous Hands Dex3-1 руки з трьома пальцями, що мають високу спритність та керуються силою з тактильним зворотним зв’язком. Робот підтримує вторинну розробку та роботу з інструментами ROS2 і SDK2, що дозволяє програмувати рухи, навігацію та взаємодію з об’єктами в реальному часі. Оснащений камерою Intel RealSense D435i, 3D LiDAR та іншими сенсорами. Кожна рука має 33 тактильних сенсори та здатна делікатно працювати з предметами завдяки гібридному силовому керуванню.

Переваги Unitree G1 Edu Pro B-U10
- Ступінь свободи та людиноподібна кінематика. Робот гуманоїд має 37 ступенів свободи. Великі кути руху суглобів рук, ніг і корпусу забезпечують виконання складних маніпуляцій, балансування та пересування в умовах дослідницьких проєктів.
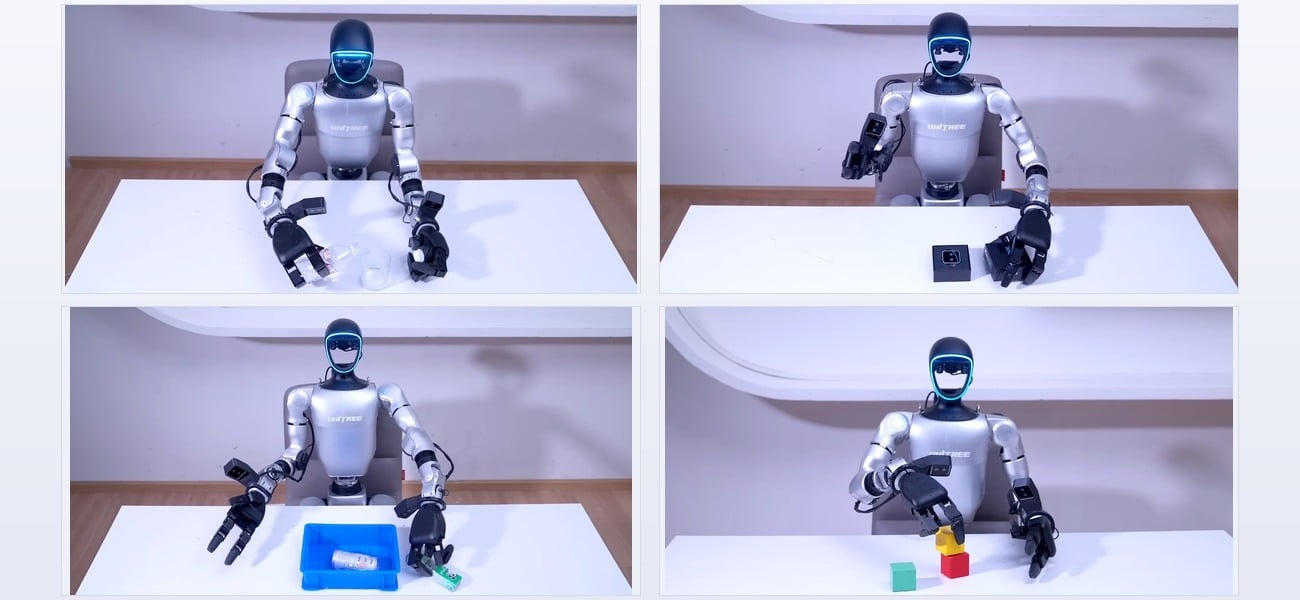
- Людиноподібні кисті Dex3-1. Модель оснащена двома трипалими кистями Dex3-1 з силовим регульваним керуванням і 33 тактильних сенсори на кожній руці. Маніпулятори підтримують точну роботу з крихкими предметами, збирають дані про силу притискання в реальному часі та забезпечують високоточне захоплення об’єктів.
- Висока обчислювальна потужність. Бортовий модуль NVIDIA Jetson Orin NX 16GB понад 100 TOPS оптимізований для обробки комп’ютерного зору, імітаційного навчання та методів із підкріпленням RL. Працює з мультимодальними моделями ШІ UnifoLM.
- Всебічне сприйняття простору. Круговий огляд 360° забезпечують фірмовий лідар Unitree 4D LiDAR-L1, глибинна камера Intel RealSense D435i та додатковий 3D LiDAR для навігації та 3D SLAM. Масив із 4 мікрофонів відповідає за розпізнавання команд. Це дозволяє будувати тривимірні карти приміщення, розпізнавати перешкоди та працювати з голосовими командами.
- Гнучке програмування. Відкритий повний низько- та високорівневий контроль над приводами через unitree_sdk2 (C++/Python). Робот повністю сумісний із ROS2 та має готові цифрові моделі URDF для симуляції в Gazebo й Isaac Sim, що спрощує тестування алгоритмів до запуску на реальному обладнанні.
- Надійна силова механіка. Колінні приводи розвивають крутний момент до 120 Нм, а промислові роликові підшипники розраховані на тривалу експлуатацію. Знімний акумулятор 9000 мАг забезпечує до 2 годин автономної роботи, а складний корпус 690x450x300 мм полегшує транспортування між лабораторіями та навчальними центрами.
- Офіційна гарантія. На роботизований комплекс серії Edu розповсюджується гарантія терміном 18 місяців, що забезпечує повну технічну підтримку та сервісне обслуговування.
Конструкція та апаратна частина
Роботизована платформа має стійку архітектуру зі зростом 1320 мм та загальною вагою близько 35 кг, яка розрахована на тривалі експерименти та інтенсивні динамічні навантаження. Рухомі вузли колін оснащені високоефективними двигунами з постійними магнітами (PMSM) з низькою інерцією, які генерують крутний момент до 120 Н·м для миттєвої стабілізації положення тіла, бігу чи подолання перешкод.
Великі кути відхилення тазових, колінних та поясних суглобів дозволяють реалізовувати складні сценарії руху, недоступні для більшості інших гуманоїдних платформ. Усі рухомі зчленування механізму укомплектовані промисловими перехресними роликовими підшипниками для високої точності позиціювання. Кабельна проводка прокладена прихованим способом усередині порожнистих елементів каркаса, що повністю захищає лінії зв’язку від механічного зносу. Важливою інженерною перевагою є наявність вбудованого у голову динаміка потужністю 5 Вт, який разом із масивом мікрофонів забезпечує повноцінний двосторонній голосовий зв’язок. Для зручного транспортування між лабораторіями чи аудиторіями корпус складається до компактних габаритів — 690×450×300 мм.
Точна робота з предметами завдяки гнучкості
Unitree G1 Edu Pro B-U10 оснащений двома трипалими кистями Dex3-1 з силовим керуванням і 33 тактильними сенсорами на кожній руці. Кисті є agile hand with tactile sensation і повністю сумісні з усіма можливостями стандартної версії Edu. Головною особливістю є інтегроване гібридне керування зусиллям і положенням суглобів, завдяки чому пристрій точнісінько розраховує силу взаємодії з оточенням. Це дозволяє роботу делікатно працювати з предметами різної геометричної форми, щільності та крихкості — скляного посуду, інструментів та інших об’єктів.
Анатомічна структура маніпуляторів підтримує збір даних про силу притискання та опір матеріалу в режимі реального часу, що допомагає дослідникам відпрацьовувати точні сценарії захоплення. Кисті Dex3-1 забезпечують високу точність і чутливість завдяки 33 тактильним сенсорам на кожній руці.
Центр керування та обчислювальна платформа
Для інженерів та розробників у Unitree G1 Edu Pro B-U10 відкритий повний низькорівневий та високорівневий контроль над приводами й сенсорами через відкритий інтерфейс unitree_sdk2 на мовах програмування C++ та Python. Повна інтеграція з операційною системою ROS2 спрощує підключення сторонніх програмних модулів та плагінів. Наявність деталізованих цифрових моделей URDF дозволяє запускати точну симуляцію фізичної поведінки гуманоїда у віртуальних середовищах Gazebo та NVIDIA Isaac Sim перед тестуванням алгоритмів на реальному залізі.
На спині робота передбачені стандартизовані отвори для надійної фіксації додаткового обладнання. Для підключення сторонніх датчиків та корисного навантаження виведено лінії живлення різної напруги на 12V, 24V та 58V, а також швидкісні інженерні інтерфейси: порти Gigabit Ethernet RJ45, USB-C та промислові шини GPIO, I²C та UART.
Інтелектуальні сенсори для точного розпізнавання об’єктів
Просторова орієнтація та побудова карт у тривимірному просторі базується на комплексному поєднанні сучасних сенсорів машинного зору. У голову робота інтегровано фірмовий круговий лідар Unitree 4D LiDAR-L1, який здійснює 21 600 лазерних сканувань на секунду, забезпечуючи надточне сканування навколишнього середовища без сліпих зон.
Система сприйняття доповнена глибинною RGB-D камерою Intel RealSense D435i та додатковим далекобійним 3D LiDAR. Такий гібридний масив датчиків дозволяє роботу без затримок будувати 3D-карти за технологією SLAM, розпізнавати об’єкти на шляху та динамічно оминати перешкоди. За отримання та аналіз акустичної інформації відповідає масив із 4 вбудованих мікрофонів, за допомогою яких реалізуються алгоритми точної локалізації джерела звуку в кімнаті та розпізнавання голосових команд користувача.
Навчальна платформа для розробки ШІ та тестування автономної поведінки
Головним обчислювальним вузлом Unitree G1 Edu Pro B-U10 є бортовий комп’ютер на базі модуля NVIDIA Jetson Orin NX ємністю 16 ГБ. З обчислювальною потужністю понад 100 TOPS платформа ідеально оптимізована для локальної обробки важких нейромереж та алгоритмів комп’ютерного зору безпосередньо на борту робота.
Модель підтримує передові методи машинного навчання — імітаційне навчання (на основі дій людини-оператора) та тренування з підкріпленням (Reinforcement Learning). Програмні можливості та патерни рухів регулярно оновлюються через бездротові пакети OTA. Апаратне забезпечення повністю адаптоване під локальну роботу з великими мультимодальними моделями штучного інтелекту UnifoLM. Це дозволяє програмувати абсолютно автономну поведінку робота, розпізнавання складних послідовних інженерних команд та взаємодію з людьми без необхідності постійного підключення до хмарних серверів.
Сфери застосування
Unitree G1 Edu Pro B-U10 створений для наукових і освітніх проєктів. Платформа дозволяє проводити експерименти з автономною мобільністю, низькорівневим контролем приводів та керуванням маніпуляторами у таких напрямках:
- Наукові дослідження та R&D: розробка алгоритмів штучного інтелекту, тестування методів навчання з підкріпленням (Reinforcement Learning) та моделювання людино-машинної взаємодії.
- Навігація та сприйняття простору: дослідження автономної навігації, комп’ютерного зору, побудови тривимірних карт приміщень та алгоритмів SLAM.
- Маніпуляція та керування рухом: відпрацювання делікатного захоплення предметів з використанням тактильних кистей Dex3-1, тестування патернів ходьби та алгоритмів динамічного керування рухом.
- Освіта та прикладне застосування: навчання студентів робототехніці й мехатроніці, проведення лабораторних університетських проєктів та проектування сервісних роботів.
Сумісність із навчальними платформами
Unitree G1 Edu Pro B-U10 адаптований для використання в університетах, дослідницьких лабораторіях та навчальних центрах. Відкрита архітектура спрощує інтеграцію з додатковим обладнанням та програмними комплексами.
Робот гуманоїд підтримує роботу з:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- зовнішніми камерами;
- додатковими LiDAR-сенсорами;
- лабораторними системами збору даних;
- дослідницькими платформами машинного навчання;
- мережевими Ethernet-пристроями;
- GPIO-модулями та периферійним обладнанням.
Завдяки стандартизованим інтерфейсам підключення платформа легко адаптується до різних наукових і навчальних проєктів. Наявність технічної документації та інструментів для розробників дозволяє швидко розпочати роботу над власними дослідницькими завданнями.
Комплектація
Пристрій постачається у зібраному вигляді та готовий до первинного запуску після розпакування. До базового комплекту входять усі необхідні елементи для автономного живлення та бездротового контролю.
- Робот-гуманоїд Unitree G1 Edu.
- Швидкознімний літієвий акумулятор ємністю 9000 мАг.
- Мережевий зарядний пристрій параметрами 54 В, 5 А.
- Бездротовий ручний пульт керування.
- Інструкція з експлуатації та технічний паспорт.
Технічні характеристики Unitree G1 EDU
| Параметр | Значення |
| Розміри робочого положення | 1320x450x200 мм |
| Розміри складеного положення | 690x450x300 мм |
| Вага нетто з акумулятором | Близько 35 кг |
| Кількість ступенів свободи (DOF) | 37 DoF |
| Ступені свободи однієї ноги | 6 |
| Ступені свободи корпусу | 1 |
| Ступені свободи однієї руки | 5 (з урахуванням кисті Dex3-1) |
| Тип кистей-маніпуляторів | 2x Dex3-1 force controlled three finger dexterous hands (tactile) |
| Тактильні сенсори | 33 на кожну руку |
| Граничне навантаження на руку | До 3 кг |
| Максимальний крутний момент колінного суглоба | 120 Нм |
| Підшипники суглобів | Промислові перехресні роликові підшипники |
| Тип приводів | PMSM із внутрішнім ротором, низькою інерцією та високою швидкістю |
| Поворот корпусу (вісь Z) | ±155° |
| Нахил корпусу (вісь X) | ±30° |
| Нахил корпусу (вісь Y) | ±30° |
| Рух колінного суглоба | 0° ~ 165° |
| Тазостегновий суглоб (Pitch) | ±154° |
| Тазостегновий суглоб (Roll) | -30° ~ +170° |
| Тазостегновий суглоб (Yaw) | ±158° |
| Зап’ястя (Pitch) | ±92,5° |
| Зап’ястя (Yaw) | ±92,5° |
| Порожня внутрішня проводка через суглоби | Так |
| Енкодери суглобів | Подвійні енкодери |
| Система охолодження | Локальне повітряне охолодження |
| Тип акумулятора | Літієвий акумулятор 13S |
| Ємність акумулятора | 9000 мА/год |
| Знімний акумулятор | Так (підтримка гарячої заміни) |
| Час автономної роботи | До 2 годин |
| Зарядний пристрій | 54 В, 5 А |
| Базова обчислювальна платформа | 8-ядерний високопродуктивний процесор |
| Модуль високопродуктивних обчислень | NVIDIA Jetson Orin NX 16GB |
| Датчики сприйняття середовища | Глибинна камера Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Масив мікрофонів | 4 інтегровані мікрофони |
| Вбудований динамік | 5 Вт |
| Бездротові інтерфейси | Wi-Fi 6, Bluetooth 5.2 |
| Доступ до апаратних інтерфейсів | Два порти Gigabit Ethernet (RJ45), 4 x USB-C, шини GPIO, I²C, UART |
| Виходи живлення | 12V, 24V, 58V |
| Програмні середовища | ROS 2, Python, C++, unitree_sdk2, моделі URDF |
| Вторинна розробка | Підтримується в повному обсязі |
| OTA-оновлення | Підтримуються |
| Гарантія виробника | 18 місяців |
Що необхідно робити перед початком та під час роботи
- Контроль живлення: Перед кожним запуском обов’язково перевіряйте рівень заряду акумулятора, щоб уникнути раптового вимкнення робота під час виконання рухів.
- Підготовка покриття: Використовуйте виключно рівну, суху та неслизьку поверхню для відпрацювання алгоритмів ходьби, стабілізації та балансування.
- Оновлення системи: Регулярно оновлюйте програмне забезпечення та пакети рухових навичок через офіційні бездротові інструменти (OTA) від Unitree.
- Екосистема розробки: Для створення власних алгоритмів, симуляцій та вторинної розробки рекомендується застосовувати офіційні середовища ROS2 та unitree_sdk2.
Суворі обмеження та безпека
- Запуск без опори. Не допускається вмикати живлення Unitree G1 Edu, коли він лежить на землі або перебуває у нестійкому положенні без підтримки. Первинний запуск та калібрування мають відбуватися лише на захисній підвісній стійці або на спеціальному стільці.
- Грубе встановлення акумулятора. Уникайте втискання батареї у фюзеляж із застосуванням надмірної фізичної сили. Якщо блок не заходить плавно по пазах до клацання, негайно зупиніть процес, щоб не пошкодити внутрішні інженерні роз’єми живлення.
- Програмування без Debug-режиму. Забороняється надсилати власні команди через SDK, не перевівши попередньо робота в режим розробки (L2 + R2). Нехтування цим правилом викликає жорсткий конфлікт із вбудованим контролером рухів, що призводить до сильного тремтіння (jitter) та поломки приводів.
- Перевищення навантаження. Не дозволяється навантажувати роботизовані кисті Dex3-1 вагою понад 3 кг. Перевантаження призведе до критичного перегріву сервоприводів та виходу з ладу редукторів.
- Гаряче підключення датчиків. Виключено підключення або від’єднання сторонніх сенсорів й модулів розширення до інтерфейсів GPIO, I²C, UART на спині робота, коли систему увімкнено та на порти подається напруга. Всі маніпуляції з корисним навантаженням виконуються лише на знеструмленому пристрої.
Купити Unitree G1 Edu Pro B-U10
Якщо ви плануєте Unitree G1 Edu Pro B-U10 купити для дослідницьких або навчальних задач, уточніть актуальну Unitree G1 ціна, прайс і доступні комплектації перед оформленням замовлення.



































 робот-доставник та рекламний робот")
 робот-доставник та рекламний робот")
