

















- Доступність: В наявності
- Код товару: 00-00014530
- Вага Брутто: 42.00kg

Більше товарів цього бренду




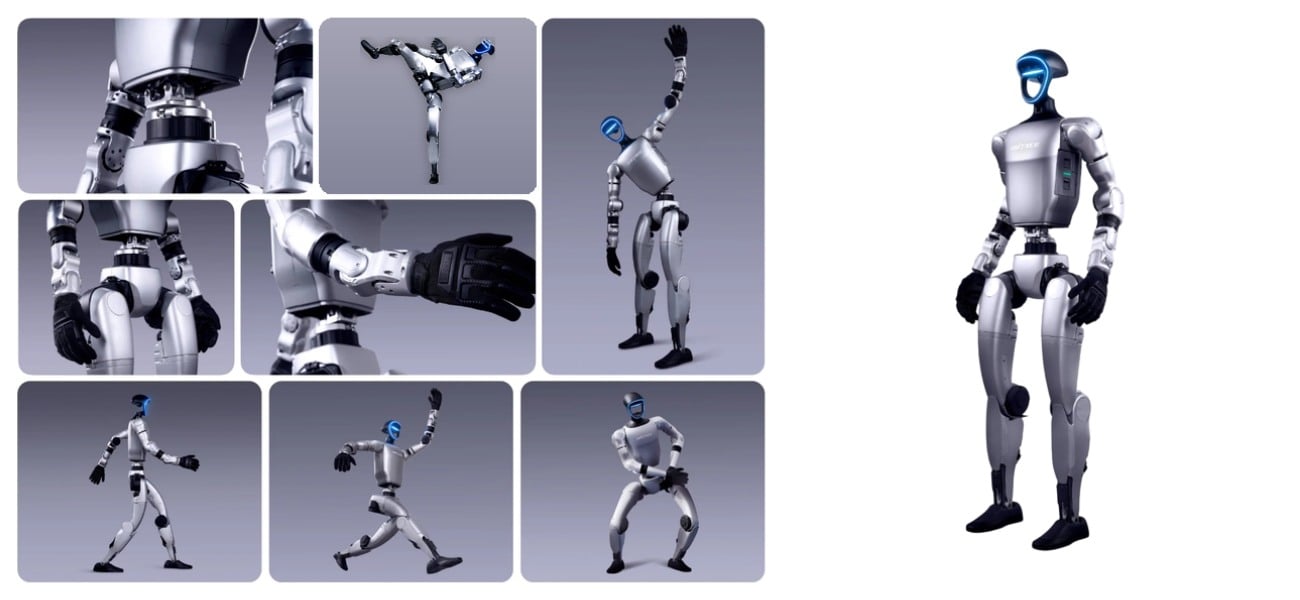
Unitree G1 Edu Pro E-U11 робот-гуманоїд для робототехнічних досліджень та навчання
Unitree G1 Edu Pro E-U11 — це робот гуманоїд для досліджень, розробки алгоритмів штучного інтелекту та навчальних проєктів, з 35 ступенями свободи, двома роботизованими кистями Revo 2 Basic і двома високорівневими обчислювальними модулями. Модель призначена для університетів, дослідницьких лабораторій, R&D-команд, навчальних центрів та інноваційних підрозділів підприємств, які працюють над задачами руху, навігації, взаємодії з предметами та автономної поведінки роботів. Платформа також може використовуватися для демонстрацій на виставках, конференціях, технологічних форумах і корпоративних заходах, де необхідно показати можливості сучасної гуманоїдної робототехніки. Пристрій підтримує всі функції версії Unitree G1 Edu Standard Edition.

Головні переваги Unitree G1 Edu Pro E-U11
- 35 ступенів свободи. Така конфігурація дозволяє відпрацьовувати складні рухові сценарії та досліджувати людиноподібну кінематику.
- Дві роботизовані кисті Revo 2 Basic. П'ятипала конструкція підходить для тестування алгоритмів захоплення та маніпулювання предметами різної форми.
- Два високорівневі обчислювальні модулі. Обчислювальні ресурси можуть застосовуватися для алгоритмів керування, машинного навчання та експериментів зі штучним інтелектом.
- Платформа для розробки ШІ. Робот дозволяє досліджувати автономну поведінку, планування руху та взаємодію з навколишнім простором.
- Навчання рухів, навігації та роботи з об'єктами. Робот гуманоїд може використовуватися для відпрацювання практичних сценаріїв у робототехніці та наукових проєктах.
- Гарантія 18 місяців. Гарантійний термін поширюється на Unitree G1 Edu Pro E-U11.
- Платформа для навчання та досліджень. Unitree G1 Edu Pro E-U11 підходить для університетів, наукових лабораторій, інноваційних центрів та команд, які працюють над робототехнічними проєктами.
Конструкція та рухові можливості
Гуманоїдний робот Unitree побудований за людиноподібною схемою з рухомими вузлами рук, ніг та корпусу. Конструкція дозволяє відпрацьовувати задачі балансування, пересування та координації рухів.
Наявність 35 ступенів свободи створює умови для дослідження складних траєкторій руху та взаємодії між окремими суглобами. Така архітектура корисна під час навчання алгоритмів керування та оцінки поведінки гуманоїдних роботів у різних сценаріях.
Руки та ноги працюють як єдина кінематична система, що дає змогу досліджувати рухи, наближені до людських. Це важливо для навчальних програм, робототехнічних курсів та експериментів із мобільністю.
Роботизовані кисті Revo 2 Basic
Unitree G1 Edu Pro E-U11 оснащений двома п'ятипалими роботизованими кистями Revo 2 Basic. Вони призначені для роботи з предметами та тестування алгоритмів захоплення.
Роботизовані кисті Revo 2 Basic дозволяють досліджувати різні способи взаємодії з об'єктами, включаючи утримання, перенесення та зміну положення предметів. Такі можливості корисні для навчання роботів роботі руками та збору даних для алгоритмів машинного навчання.
Наявність двох кистей також дає змогу моделювати сценарії двосторонньої маніпуляції, які часто використовуються у дослідженнях гуманоїдної робототехніки.
Обчислювальні можливості та розробка ШІ
Робот гуманоїд Unitree G1 Edu Pro E-U11 оснащений двома високорівневими обчислювальними модулями. Вони можуть застосовуватися для розробки та тестування алгоритмів керування, машинного навчання й автономної поведінки.
Платформа підходить для задач, пов'язаних із дослідженням рухів, навігацією та аналізом взаємодії робота з навколишнім простором. Робот для розробки ШІ може використовуватися в навчальних курсах, лабораторних роботах і дослідницьких проєктах, де потрібна реальна гуманоїдна платформа для перевірки алгоритмів.
Оскільки для цієї моделі в наданому джерелі не підтверджено перелік програмних інструментів, інформація про підтримку конкретних платформ розробки потребує додаткового уточнення перед замовленням.
Сумісність із навчальними платформами
Unitree G1 Edu Pro E-U11 адаптований для використання в університетах, дослідницьких лабораторіях та навчальних центрах. Відкрита архітектура спрощує інтеграцію з додатковим обладнанням та програмними комплексами.
Робот гуманоїд підтримує роботу з:
- ROS 2;
- Python;
- C++;
- NVIDIA JetPack;
- зовнішніми камерами;
- додатковими LiDAR-сенсорами;
- лабораторними системами збору даних;
- дослідницькими платформами машинного навчання;
- мережевими Ethernet-пристроями;
- GPIO-модулями та периферійним обладнанням.
Завдяки стандартизованим інтерфейсам підключення платформа легко адаптується до різних наукових і навчальних проєктів. Наявність технічної документації та інструментів для розробників дозволяє швидко розпочати роботу над власними дослідницькими завданнями.
Сфери застосування
Unitree G1 Edu Pro E-U11 призначений для дослідницьких, освітніх та інженерних завдань, де необхідна реальна гуманоїдна платформа для перевірки алгоритмів і практичних сценаріїв роботи роботів. Модель може використовуватися як у наукових проєктах, так і під час технологічних демонстрацій, виставок, виробничих досліджень та публічних заходів.
- Університети: навчання студентів робототехніці, мехатроніці та системам керування.
- R&D-лабораторії: тестування нових алгоритмів руху, навігації та взаємодії з об'єктами.
- Робототехніка: дослідження людиноподібної кінематики та керування багатосуглобовими системами.
- Штучний інтелект: навчання та перевірка моделей автономної поведінки роботів.
- Навчальні центри: проведення практичних занять і демонстрацій робототехнічних технологій.
- Дослідження людино-машинної взаємодії: вивчення способів взаємодії людей із гуманоїдними роботами.
- Тестування автономної навігації: відпрацювання алгоритмів орієнтації та переміщення в приміщеннях.
- Робота з предметами: дослідження сценаріїв захоплення, утримання та переміщення об'єктів.
- Технологічні виставки та демонстраційні заходи: презентація робототехнічних розробок, наукових проєктів і навчальних програм.
- Івенти та публічні заходи: демонстрація можливостей гуманоїдних роботів під час конференцій, форумів і тематичних виставок.
- Виробничі дослідження: перевірка перспектив застосування гуманоїдних роботів у допоміжних операціях та експериментальних виробничих процесах.
- Корпоративні інноваційні центри: тестування нових підходів до автоматизації та взаємодії роботів із персоналом.
- Центри розробки нових технологій: збір даних для створення та вдосконалення алгоритмів керування роботами.
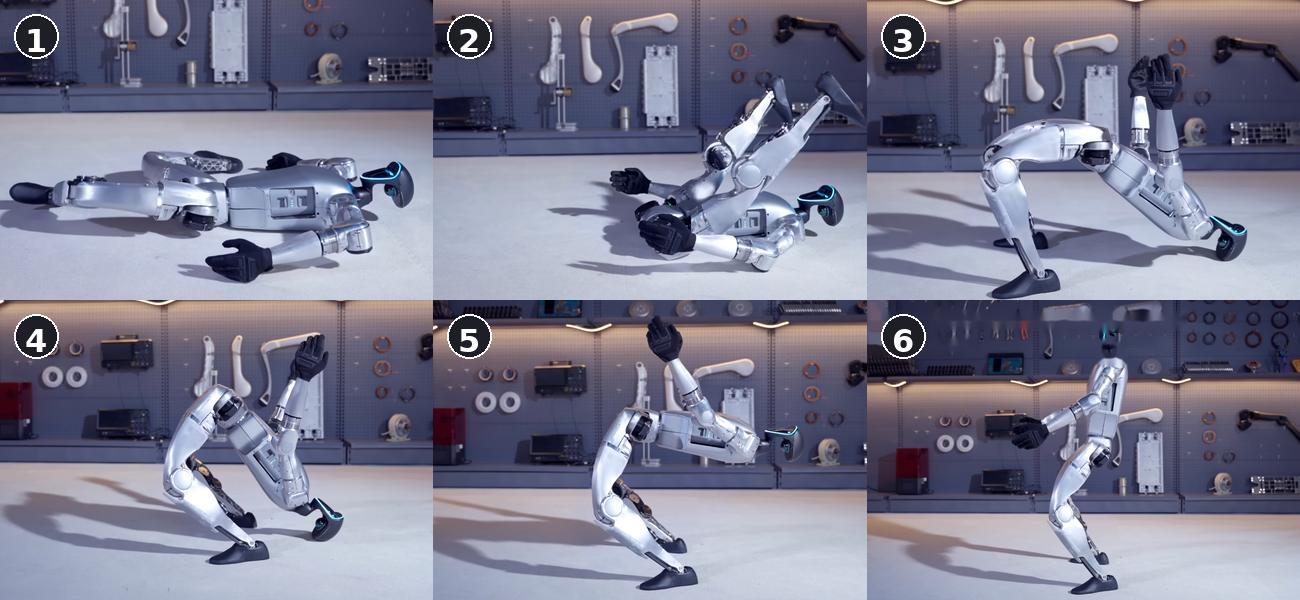
Щоб краще зрозуміти, як працює Unitree G1 Edu Pro E-U11, перегляньте відео нижче. У ньому видно рухи робота, його можливості та приклади використання для навчання, досліджень, тестування алгоритмів і демонстрацій.
Комплектація
Unitree G1 Edu Pro E-U11 постачається у зібраному вигляді та підготовлений до первинного налаштування після отримання. Точний склад комплекту залежить від конфігурації та погоджується перед оформленням замовлення.
- Гуманоїдний робот Unitree G1 EDU — 1 шт.
- Акумулятор 9000 мА/год — 1 шт.
- Зарядний пристрій 54 В 5 А — 1 шт.
- Ручний контролер — 1 шт.
- Додатковий обчислювальний модуль (залежно від конфігурації) — 1 шт.
Технічні характеристики Unitree G1 EDU Pro E-U11
| Параметр | Значення |
|---|---|
| Вага нетто з акумулятором | Близько 35 кг |
| Кількість ступенів свободи (DOF) | 35 DoF |
| Ступені свободи однієї ноги | 6 |
| Ступені свободи корпусу | 1 |
| Ступені свободи однієї руки | 5 |
| Тип кистей-маніпуляторів | Revo 2 Basic (п'ятипалі людиноподібні) |
| Розміри складеного положення | 690x450x300 мм |
| Розміри робочого положення | 1320x450x200 мм |
| Граничне навантаження на руку | До 3 кг |
| Максимальний крутний момент колінного суглоба | 120 Нм |
| Підшипники суглобів | Промислові перехресні роликові підшипники |
| Тип приводів | PMSM із внутрішнім ротором, низькою інерцією та високою швидкістю |
| Поворот корпусу (вісь Z) | ±155° |
| Нахил корпусу (вісь X) | ±30° |
| Нахил корпусу (вісь Y) | ±30° |
| Рух колінного суглоба | 0° ~ 165° |
| Тазостегновий суглоб (Pitch) | ±154° |
| Тазостегновий суглоб (Roll) | -30° ~ +170° |
| Тазостегновий суглоб (Yaw) | ±158° |
| Зап'ястя (Pitch) | ±92,5° |
| Зап'ястя (Yaw) | ±92,5° |
| Порожня внутрішня проводка через суглоби | Так |
| Енкодери суглобів | Подвійні енкодери |
| Система охолодження | Локальне повітряне охолодження |
| Тип акумулятора | Літієвий акумулятор 13S |
| Ємність акумулятора | 9000 мА/год |
| Знімний акумулятор | Так (підтримка гарячої заміни) |
| Час автономної роботи | До 2 годин |
| Зарядний пристрій | 54 В, 5 А |
| Базова обчислювальна платформа | 8-ядерний високопродуктивний процесор |
| Модуль високопродуктивних обчислень | NVIDIA Jetson Orin NX 16GB |
| Датчики сприйняття середовища | Глибинна камера Intel RealSense D435i, 3D LiDAR, Unitree 4D LiDAR-L1 |
| Масив мікрофонів | 4 інтегровані мікрофони |
| Вбудований динамік | 5 Вт |
| Бездротові інтерфейси | Wi-Fi 6, Bluetooth 5.2 |
| Доступ до апаратних інтерфейсів | Два порти Gigabit Ethernet (RJ45), 4 x USB-C, шини GPIO, I²C, UART |
| Виходи живлення | 12V, 24V, 58V |
| Програмні середовища | ROS 2, Python, C++, unitree_sdk2, моделі URDF |
| Вторинна розробка | Підтримується в повному обсязі |
| OTA-оновлення | Підтримуються |
| Гарантія виробника | 18 місяців |
| Призначення | Академічні дослідження, штучний інтелект, машинного навчання, тестування SLAM |
Застереження щодо використання для Unitree G1 Edu Pro E-U11
- Запуск без опори. Не вмикайте Unitree G1 Edu Pro E-U11, якщо робот лежить на підлозі, нахилений або перебуває в нестійкому положенні без підтримки. Первинний запуск, калібрування та тестування базових рухів потрібно виконувати на захисній підвісній стійці або на спеціальному опорному стільці.
- Неправильне встановлення акумулятора. Не втискайте батарею в корпус із надмірною силою. Якщо акумулятор не заходить плавно по напрямних до фіксації, зупиніть встановлення та перевірте його положення. Силове встановлення може пошкодити роз’єми живлення та внутрішні контактні групи.
- Програмування без режиму розробки. Не надсилайте власні команди через SDK без попереднього переходу в режим розробки, передбачений виробником. Інакше може виникнути конфлікт між зовнішніми командами та вбудованим контролером рухів, що здатне спричинити ривки, тремтіння приводів, помилки стабілізації або механічне пошкодження вузлів.
- Перевищення навантаження на кисті. Не перевищуйте допустиме навантаження для роботизованих кистей Revo 2 Basic. Робота з надто важкими предметами може призвести до перегріву сервоприводів, прискореного зносу редукторів і втрати точності захоплення.
- Підключення модулів під напругою. Не підключайте та не від’єднуйте сторонні сенсори, плати розширення або інші модулі до інтерфейсів GPIO, I²C, UART чи інших портів, коли робот увімкнений. Усі роботи з додатковим обладнанням, корисним навантаженням і зовнішніми модулями потрібно виконувати лише після повного знеструмлення пристрою.
- Тестування нових сценаріїв. Не запускайте неперевірені алгоритми ходьби, маніпуляції або балансування поруч із людьми, тваринами, скляними поверхнями, стендами чи дорогим обладнанням. Перші тести проводьте у вільній зоні з достатнім простором навколо робота та можливістю швидко зупинити виконання команди.
- Механічне втручання під час руху. Не торкайтеся шарнірів, кистей, колінних вузлів, плечових приводів і рухомих частин під час роботи робота. Приводи Unitree G1 Edu Pro E-U11 мають високий крутний момент, тому фізичне втручання під час руху може бути небезпечним для користувача та самого обладнання.
Купити Unitree G1 Edu Pro E-U11
Якщо ви плануєте Unitree G1 Edu Pro E-U11 купити для дослідницьких або навчальних задач, уточніть актуальну Unitree G1 ціна, прайс і доступні комплектації перед оформленням замовлення.



































 робот-доставник та рекламний робот")
 робот-доставник та рекламний робот")
